Download presentation
Presentation is loading. Please wait.

1
Chapter 5 Plan-Space Planning

2
Motivation Problem with state-space search
In some cases we may try many different orderings of the same actions before realizing there is no solution Least-commitment strategy: don’t commit to orderings, instantiations, etc., until necessary dead end … a b c dead end … b a dead end … b a goal b dead end … a c dead end … b c a dead end … c b

3
Total Order Plans: Partial Order Plans: Start Start Start Start Start
Right Sock Right Sock Left Sock Left Sock Right Sock Left Sock Left Sock Right Sock Left Sock Left Sock Right Sock Right Sock Right Shoe Left Shoe Left Sock on Right Sock on Left Shoe Right Shoe Right Shoe Left Sock Right Shoe Left Shoe Left Sock Right Sock Right Shoe on Left Shoe on Right Shoe Left Shoe Right Shoe Left Shoe Right Shoe Left Shoe Finish Finish Finish Finish Finish Finish Finish

4
Outline Basic idea Open goals Threats The PSP algorithm Long example
Comments

5
Plan Space

6
Plan-Space Planning - Basic Idea
Backward search from the goal Each node of the search space is a partial plan A set of partially-instantiated actions A set of constraints Make more and more refinements, until we have a solution Types of constraints: precedence constraint: a must precede b binding constraints: inequality constraints, e.g., v1 ≠ v2 or v ≠ c equality constraints (e.g., v1 = v2 or v = c) or substitutions causal link: use action a to establish the precondition p needed by action b How to tell we have a solution: no more flaws in the plan Will discuss flaws and how to resolve them b(y) Precond: p(y) Effects: … x ≠ y a(x) Precond: … Effects: p(x) c(x) Precond: p(x) Effects: … p(x)
 or substitutions. causal link: use action a to establish the precondition p needed by action b. How to tell we have a solution: no more flaws in the plan. Will discuss flaws and how to resolve them. b(y) Precond: p(y) Effects: … x ≠ y. a(x) Precond: … Effects: p(x) c(x) Precond: p(x) Effects: … p(x)")
7
Open Goal Flaw: An action a has a precondition p that we haven’t decided how to establish Resolving the flaw: Find an action b (either already in the plan, or insert it) that can be used to establish p can precede a and produce p Instantiate variables Create a causal link c(x) Precond: p(x) Effects: … a(y) Precond: … Effects: p(y) c(x) Precond: p(x) Effects: … a(x) Precond: … Effects: p(x) p(x)
 that can be used to establish p. can precede a and produce p. Instantiate variables. Create a causal link. c(x) Precond: p(x) Effects: … a(y) Precond: … Effects: p(y) c(x) Precond: p(x) Effects: … a(x) Precond: … Effects: p(x) p(x)")
8
Threat Flaw: a deleted-condition interaction
Action a establishes a condition (e.g., p(x)) for action b Another action c is capable of deleting this condition p(x) Resolving the flaw: impose a constraint to prevent c from deleting p(x) Three possibilities: Make b precede c Make c precede a Constrain variable(s) to prevent c from deleting p(x) a(x) Precond: … Effects: p(x) b(x) Precond: p(x) Effects: … p(x) c(y) Precond: … Effects: p(y)
) for action b. Another action c is capable of deleting this condition p(x) Resolving the flaw: impose a constraint to prevent c from deleting p(x) Three possibilities: Make b precede c. Make c precede a. Constrain variable(s) to prevent c from deleting p(x) a(x) Precond: … Effects: p(x) b(x) Precond: p(x) Effects: … p(x) c(y) Precond: … Effects: p(y)")
9
The PSP Procedure PSP is both sound and complete

10
Example Similar (but not identical) to an example in Russell and Norvig’s Artificial Intelligence: A Modern Approach (1st edition) Operators: Start Precond: none Effects: At(Home), sells(HWS,Drill), Sells(SM,Milk), Sells(SM,Banana) Finish Precond: Have(Drill), Have(Milk), Have(Banana), At(Home) Go(l,m) Precond: At(l) Effects: At(m), At(l) Buy(p,s) Precond: At(s), Sells(s,p) Effects: Have(p)
, sells(HWS,Drill), Sells(SM,Milk), Sells(SM,Banana) Finish. Precond: Have(Drill), Have(Milk), Have(Banana), At(Home) Go(l,m) Precond: At(l) Effects: At(m), At(l) Buy(p,s) Precond: At(s), Sells(s,p) Effects: Have(p)")
11
Example (continued) Initial plan At(Home), Sells(HWS,Drill),
Sells(SM,Milk), Sells(SM,Bananas) Have(Drill), Have(Milk), Have(Bananas), At(Home)
, Sells(SM,Bananas) Have(Drill), Have(Milk), Have(Bananas), At(Home)")
12
Example (continued) The only possible ways to establish the “Have” preconditions At(s1), Sells(s1,Drill) At(s2), Sells(s2,Milk) At(s3), Sells(s3,Bananas) Buy(Drill, s1) Buy(Milk, s2) Buy(Bananas, s2) Have(Drill), Have(Milk), Have(Bananas), At(Home)
, Sells(s2,Milk) At(s3), Sells(s3,Bananas) Buy(Drill, s1) Buy(Milk, s2) Buy(Bananas, s2) Have(Drill), Have(Milk), Have(Bananas), At(Home)")
13
Example (continued) The only possible way to establish the “Sells” preconditions At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Have(Drill), Have(Milk), Have(Bananas), At(Home)
, Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Have(Drill), Have(Milk), Have(Bananas), At(Home)")
14
Example (continued) The only ways to establish At(HWS) and At(SM)
Note the threats At(l2) At(x) At(l1) Go(l1,HWS) Go(l2, SM) At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Have(Drill), Have(Milk), Have(Bananas), At(Home)
 At(x) At(l1) Go(l1,HWS) Go(l2, SM) At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Have(Drill), Have(Milk), Have(Bananas), At(Home)")
15
Example (continued) To resolve the third threat, make Buy(Drill) precede Go(SM) This resolves all three threats At(l2) At(x) At(l1) Go(l1,HWS) Go(l2, SM) At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Have(Drill), Have(Milk), Have(Bananas), At(Home)
 At(x) At(l1) Go(l1,HWS) Go(l2, SM) At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Have(Drill), Have(Milk), Have(Bananas), At(Home)")
16
Example (continued) Establish At(l1) with l1=Home At(l2) At(Home)
At(x) At(Home) Go(Home,HWS) Go(l2, SM) At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Have(Drill), Have(Milk), Have(Bananas), At(Home)
 At(Home) Go(Home,HWS) Go(l2, SM) At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Have(Drill), Have(Milk), Have(Bananas), At(Home)")
17
Example (continued) Establish At(l2) with l2=HWS At(HWS) At(Home)
At(x) At(Home) Go(Home,HWS) Go(HWS,SM) At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Have(Drill), Have(Milk), Have(Bananas), At(Home)
 At(Home) Go(Home,HWS) Go(HWS,SM) At(HWS), Sells(HWS,Drill) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Have(Drill), Have(Milk), Have(Bananas), At(Home)")
18
Example (continued) Establish At(Home) for Finish At(HWS) At(Home)
At(x) At(Home) Go(Home,HWS) Go(HWS,SM) At(HWS), Sells(HWS,Drill) At(l3) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Go(l3, Home) Have(Drill), Have(Milk), Have(Bananas), At(Home)
 At(Home) Go(Home,HWS) Go(HWS,SM) At(HWS), Sells(HWS,Drill) At(l3) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Go(l3, Home) Have(Drill), Have(Milk), Have(Bananas), At(Home)")
19
Example (continued) Constrain Go(Home) to remove threats to At(SM)
At(HWS) At(x) At(Home) Go(Home,HWS) Go(HWS,SM) At(HWS), Sells(HWS,Drill) At(l3) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Go(l3, Home) Have(Drill), Have(Milk), Have(Bananas), At(Home)
 At(x) At(Home) Go(Home,HWS) Go(HWS,SM) At(HWS), Sells(HWS,Drill) At(l3) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Go(l3, Home) Have(Drill), Have(Milk), Have(Bananas), At(Home)")
20
Final Plan Establish At(l3) with l3=SM At(HWS) At(Home) Go(HWS,SM)
At(x) At(Home) Go(Home,HWS) Go(HWS,SM) At(HWS), Sells(HWS,Drill) At(SM) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Go(SM,Home) Have(Drill), Have(Milk), Have(Bananas), At(Home)
 At(Home) Go(Home,HWS) Go(HWS,SM) At(HWS), Sells(HWS,Drill) At(SM) At(SM), Sells(SM,Milk) At(SM), Sells(SM,Bananas) Buy(Drill,HWS) Buy(Milk,SM) Buy(Bananas,SM) Go(SM,Home) Have(Drill), Have(Milk), Have(Bananas), At(Home)")
21
Comments a b c b a PSP doesn’t commit to orderings and instantiations until necessary Avoids generating search trees like this one: Problem: how to prune infinitely long paths? Loop detection is based on recognizing states we’ve seen before In a partially ordered plan, we don’t know the states Can we prune if we see the same action more than once? b a goal b a c b c a c b go(b,a) go(a,b) go(b,a) at(a) • • • No. Sometimes we might need the same action several times in different states of the world (see next slide)
 go(a,b) go(b,a) at(a) • • • No. Sometimes we might need the same action several times. in different states of the world (see next slide)")
22
Example 3-digit binary counter starts at 000, want to get to 110
s0 = {d3=0, d2=0, d1=0} g = {d3=1, d2=1, d1=0} Operators to increment the counter by 1: incr0 Precond: d1=0 Effects: d1=1 incr01 Precond: d2=0, d1=1 Effects: d2=1, d1=0 incr011 Precond: d3=0, d2=1, d1=1 Effects: d3=1, d2=0, d1=0

23
A Weak Pruning Technique
Can prune all paths of length > n, where n = |{all possible states}| This doesn’t help very much There’s not yet a good pruning technique for plan-space planning Iterative deepening depth first search

24
POP algorithm Q Q POP((A, O, L), agenda, PossibleActions):
If agenda is empty, return (A, O, L) Pick (Q, An) from agenda Ad = choose an action that adds Q. If no such action exists, fail. Add the link Ad Ac to L and the ordering Ad < Ac to O If Ad is new, add it to A. Remove (Q, An) from agenda. If Ad is new, for each of its preconditions P add (P, Ad) to agenda. For every action At that threatens any link Ap Ac Choose to add At < Ap or Ac < At to O. If neither choice is consistent, fail. POP((A, O, L), agenda, PossibleActions) Q Q
 Pick (Q, An) from agenda. Ad = choose an action that adds Q. If no such action exists, fail. Add the link Ad Ac to L and the ordering Ad < Ac to O. If Ad is new, add it to A. Remove (Q, An) from agenda. If Ad is new, for each of its preconditions P add (P, Ad) to agenda. For every action At that threatens any link Ap Ac. Choose to add At < Ap or Ac < At to O. If neither choice is consistent, fail. POP((A, O, L), agenda, PossibleActions) Q. Q.")
25
POP in the Blocks world

26
POP in the Blocks world

27
POP in the Blocks world

28
POP in the Blocks world

29
Conditional Effects & Disjunctions

30
Universal Quantification

31
Building Universal Base

32
Building Universal Base (Cont.)
")
33
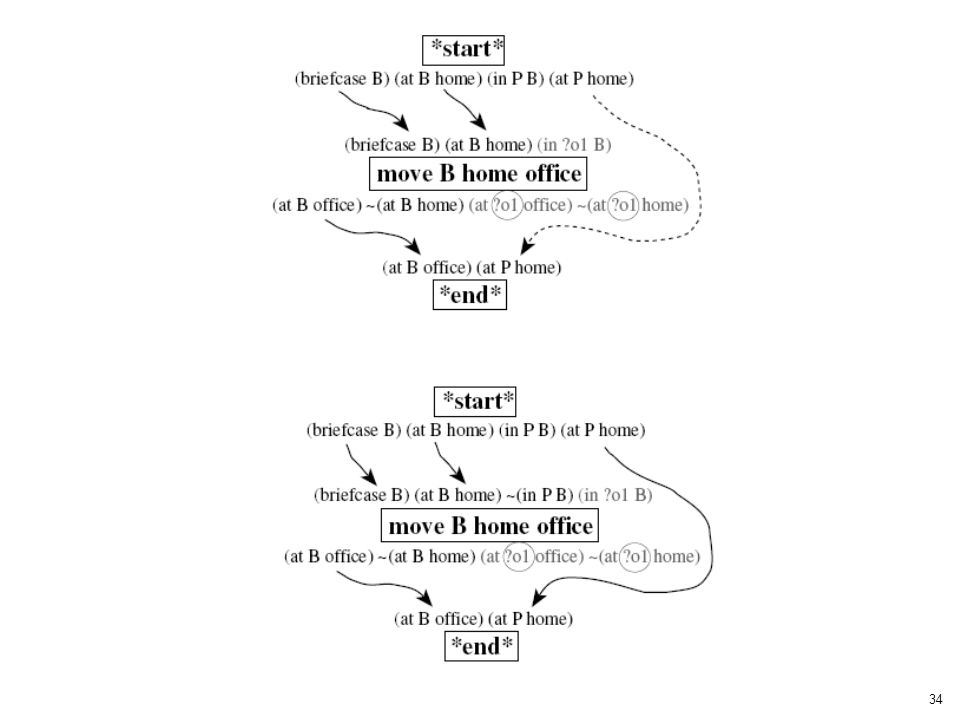
An Example of Confrontation

35
Final Plan

36
An Example of Universal Quantification

38
Final Plan

Similar presentations





 Robin Pomplun.>")















