Download presentation
Presentation is loading. Please wait.

1
Min Cost Flow: Polynomial Algorithms

2
Overview Recap: Min Cost Flow, Residual Network Potential and Reduced Cost Polynomial Algorithms Approach Capacity Scaling Successive Shortest Path Algorithm Recap Incorporating Scaling Cost Scaling Preflow/Push Algorithm Recap Incorporating Scaling Double Scaling Algorithm - Idea

3
Min Cost Flow - Recap v1v1 v2v2 v3v3 v4v4 v5v5 5 -2 -3 4,14,1 3,43,4 5,15,1 1,11,1 3,33,3

4
Min Cost Flow - Recap fdsfds Compute feasible flow with min cost

5
Residual Network - Recap

6
Reduced Cost - Recap

8
Min Cost Flow: Polynomial Algorithms

9
Approach We have seen several algorithm for the MCF problem, but none polynomial – in logU, logC. Idea: Scaling! Capacity/Flow values Costs both Next Week: Algorithms with running time independent of logU, logC Strongly Polynomial Will solve problems with irrational data

10
Capacity Scaling

11
Successive Shortest Path - Recap

14
Algorithm Complexity: Assuming integrality, at most nU iterations. In each iteration, compute shortest paths, Using Dijkstra, bounded by O(m+nlogn) per iteration
 per iteration.")
15
Capacity Scaling - Scheme Successive Shortest Path Algorithm may push very little in each iteration. Fix idea: use scaling Modify algorithm to push units of flow Ignore edges with residual capacity < until there is no node with excess or no node with deficit Decrease by factor 2, and repeat Until < 1.

16
Definitions 34 33 3 4 2 1 G(x)
")
17
Definitions 34 33 3 4 G(x, 3)
")
18
Main Observation in Algorithm Observation: Augmentation of units must start at a node in S( ), along a path in G(x, ), and end at a node in T( ). In the -phase, we find shortest paths in G(x, ), and augment over them. Thus, edges in G(x, ), will satisfy the reduced optimality conditions. We will consider edges with less residual capacity later.
, and augment over them. Thus, edges in G(x, ), will satisfy the reduced optimality conditions. We will consider edges with less residual capacity later..")
19
Initializing phases i j

20
Capacity Scaling Algorithm

21
Initial values. 0 pseudoflow and potential (optimal!) Large enough
 Large enough")
22
Capacity Scaling Algorithm In beginning of -phase, fix optimality condition on new edges with resid. Cap. r ij < 2 by saturation

23
Capacity Scaling Algorithm augment path in G(x, ) from node in S( ) to node in T( )
 from node in S( ) to node in T( )")
24
Capacity Scaling Algorithm - Correctness

26
Capacity Scaling Algorithm - Assumption We assume path from k to l in G(x, ) exists. And we assume we can compute shortest distances from k to rest of nodes. Quick fix: initially, add dummy node D with artificial edges (1,D) and (D,1) with infinite capacity and very large cost.
 and (D,1) with infinite capacity and very large cost..")
27
Capacity Scaling Algorithm – Complexity The algorithm has O(log U) phases. We analyze each phase separately.

28
Capacity Scaling Algorithm – Phase Complexity D E

29
Capacity Scaling Algorithm – Phase Complexity – Cont.

31
Capacity Scaling Algorithm – Complexity

32
Cost Scaling

33
Approximate Optimality

34
Approximate Optimality Properties a b c d 4 -5 3 -2

35
Algorithm Strategy

36
Preflow Push Recap

37
Distance Labels Distance Labels Satisfy: d(t) = 0, d(s) = n d(v) d(w) + 1 if r(v,w) > 0 d(v) is at most the distance from v to t in the residual network. s must be disconnected from t …

38
Terms Nodes with positive excess are called active. Admissible arc in the residual graph: w v d(v) = d(w) + 1
 = d(w) + 1.")
39
The preflow push algorithm While there is an active node { pick an active node v and push/relabel(v) } Push/relabel(v) { If there is an admissible arc (v,w) then { push = min {e(v), r(v,w)} flow from v to w } else { d(v) := min{d(w) + 1 | r(v,w) > 0} (relabel) }
 } Push/relabel(v) { If there is an admissible arc (v,w) then { push = min {e(v), r(v,w)} flow from v to w } else { d(v) := min{d(w) + 1 | r(v,w) > 0} (relabel) }")
40
Running Time The # of relabelings is (2n-1)(n-2) < 2n 2 The # of saturating pushes is at most 2nm The # of nonsaturating pushes is at most 4n 2 m – using potential Φ = Σ v active d(v)
(n-2) < 2n 2 The # of saturating pushes is at most 2nm The # of nonsaturating pushes is at most 4n 2 m – using potential Φ = Σ v active d(v)")
41
Back to Min Cost Flow…

42
Applying Preflow Pushs technique j i

43
Initialization v w -10

45
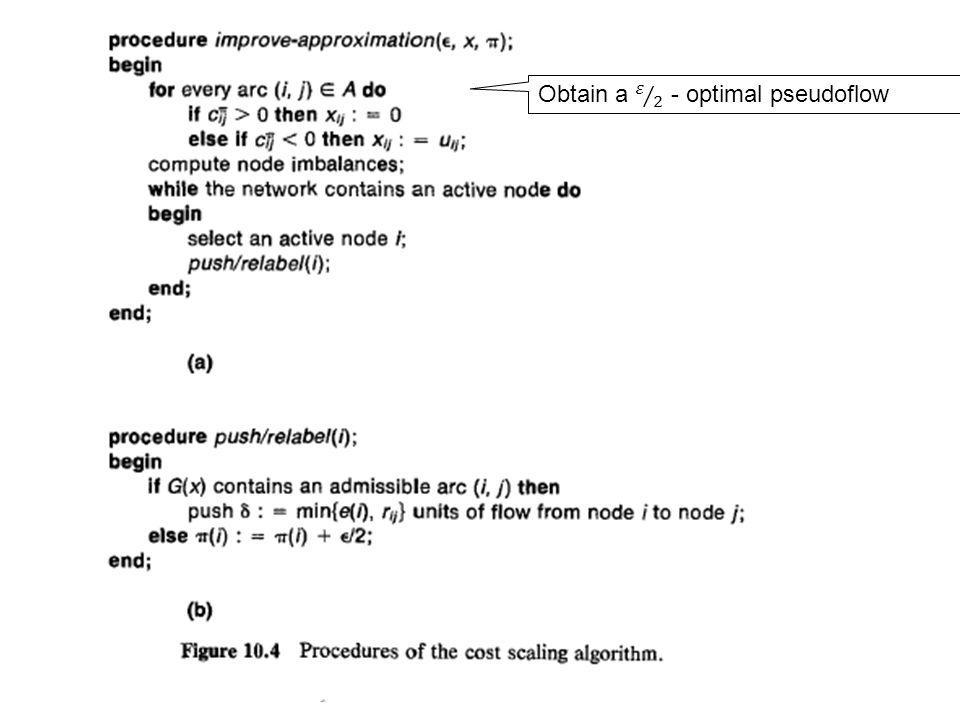
Push/relabel until no active nodes exist

46
Correctness Lemma 1: Let x be pseudo-flow, and x a feasible flow. Then, for every node v with excess in x, there exists a path P in G(x) ending at a node w with deficit, and its reversal is a path in G(x). Proof: Look at the difference x-x, and observe the underlying graph (edges with negative difference are reversed).
 ending at a node w with deficit, and its reversal is a path in G(x). Proof: Look at the difference x-x, and observe the underlying graph (edges with negative difference are reversed)..")
47
Lemma 1: Proof Cont. Proof: Look at the difference x-x, and observe the underlying graph (edges with negative difference are reversed). 34 33 3 4 2 1 32 34 2 5 2 0 -
")
48
Lemma 1: Proof Cont. Proof: Look at the difference x-x, and observe the underlying graph (edges with negative difference are reversed). v w S There must be a node with deficit reachable, otherwise x isnt feasible
. v w S There must be a node with deficit reachable, otherwise x isnt feasible.")
49
Correctness (cont) Corollary: There is an outgoing residual arc incident with every active vertex Corollary: So we can push/relabel as long as there is an active vertex
 Corollary: There is an outgoing residual arc incident with every active vertex Corollary: So we can push/relabel as long as there is an active vertex")
50
Correctness – Cont.

53
Correctness (cont)
")
54
Complexity Lemma : a node is relabeled at most 3n times.

55
Lemma 2 – Cont.

58
Complexity Analysis (Cont.) Lemma: The # of saturating pushes is at most O(nm). Proof: same as in Preflow Push.

59
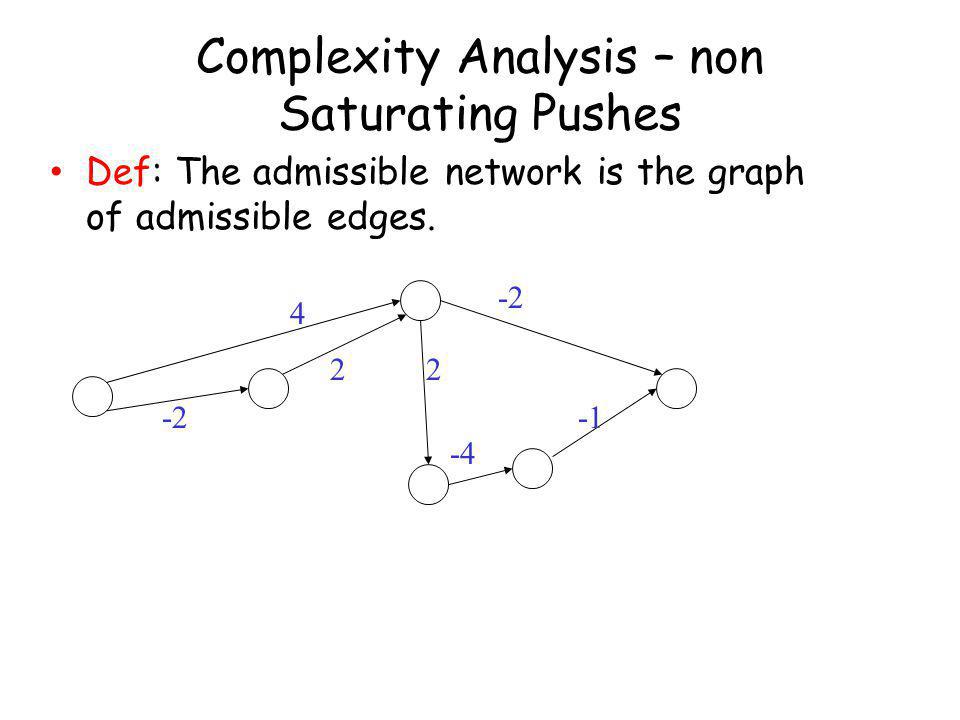
Complexity Analysis – non Saturating Pushes Def: The admissible network is the graph of admissible edges. 4 -2 2 -4 2
60
Complexity Analysis – non Saturating Pushes Def: The admissible network is the graph of admissible edges. -2 -4

61
Complexity Analysis – non Saturating Pushes Def: The admissible network is the graph of admissible edges. Lemma: The admissible network is acyclic throughout the algorithm. Proof: induction.

62
Complexity Analysis – non Saturating Pushes – Cont. Lemma: The # of nonsaturating pushes is O(n 2 m). Proof: Let g(i) be the # of nodes reachable from i in admissible network Let Φ = Σ i active g(i)
. Proof: Let g(i) be the # of nodes reachable from i in admissible network Let Φ = Σ i active g(i).")
63
Complexity Analysis – non Saturating Pushes – Cont. Φ = Σ i active g(i) By acyclicity, decreases (by at least one) by every nonsaturating push ij
 By acyclicity, decreases (by at least one) by every nonsaturating push ij.")
64
Complexity Analysis – non Saturating Pushes – Cont. Φ = Σ i active g(i) Initially g(i) = 1. Increases by at most n by a saturating push : total increase O(n 2 m) Increases by each relabeling by at most n (no incoming edges become admissible): total increase < O(n 3 ) O(n 2 m) non saturating pushes
 Initially g(i) = 1. Increases by at most n by a saturating push : total increase O(n 2 m) Increases by each relabeling by at most n (no incoming edges become admissible): total increase < O(n 3 ) O(n 2 m) non saturating pushes.")
65
Cost Scaling Summary Total complexity O(n 2 mlog(nC)). Can be improved using ideas used to improve preflow push

66
Double Scaling (If Time Permits)
")
67
Double Scaling Idea

68
Network Transformation i b(i) j b(j) C ij, u ij x ij i b(i) (i,j) C ij, x ij j b(j) -u ij 0, r ij
 j b(j) C ij, u ij x ij i b(i) (i,j) C ij, x ij j b(j) -u ij 0, r ij")
69
Improve approximation Initialization N1N1 N2N2 +

70
Capacity Scaling - Scheme

71
Double Scaling - Correctness Assuming algorithm ends, immediate, since we augment along admissible path. (Residual path from excess to node to deficit node always exists – see cost scaling algorithm) We relabel when indeed no outgoing admissible edges.
 We relabel when indeed no outgoing admissible edges..")
72
Double Scaling - Complexity O(log U) phases. In each phase, each augmentation clears a node from S( ) and doesnt introduce a new one. so O(m) augmentations per phase.
 and doesnt introduce a new one. so O(m) augmentations per phase..")
73
Double Scaling Complexity – Cont. In each augmentation, We find a path of length at most 2n (admissible network is acyclic and bipartite) Need to account retreats.
 Need to account retreats..")
74
Double Scaling Complexity – Cont. In each retreat, we relabel. Using above lemma, potential cannot grow more than O(l), where l is a length of path to a deficit node. Since graph is bipartite, l = O(n). So in all augmentations, O(n (m+n)) = O(mn) retreats. N1N1 N2N2
, where l is a length of path to a deficit node. Since graph is bipartite, l = O(n). So in all augmentations, O(n (m+n)) = O(mn) retreats. N1N1 N2N2.")
75
Double Scaling Complexity – Cont. To sum up: Implemented improve-approximation using capacity scaling O(log U) phases. O(m) augmentations per phase. O(n) nodes in path O(mn) node retreats in total. Total complexity: O(log(nC) log(U) mn)
 phases. O(m) augmentations per phase. O(n) nodes in path O(mn) node retreats in total. Total complexity: O(log(nC) log(U) mn).")
76
Thank You

Similar presentations














, two nodes s,t of V, and capacities on the arcs: uij is the capacity on arc (i,j). Find non-negative flow fij for.>")




>")




 is a directed network. Each edge (i,j) in E has an associated ‘capacity’ u ij. Goal: Determine the maximum amount.>")



