Download presentation
Presentation is loading. Please wait.

1
استاد محترم : دکتر توحيدخواه ارائه دهنده : فاطمه جهانگيري

2
Contents Why GPC? Why PID? Why GPC & PID? MPIC Methods of MPC & PID: Auto-tuned PID controller using GPC Hierarchical structure control Proposed new cost function with PID parameters An improved PID-GPC algorithm

3
Why GPC? iterative optimization has strong adaptability for uncertainties such as modeling errors and environment disturbance prediction with perfect theory frame For long time-delay, non-minimum phase and non- linear processes

4
Why GPC? The purpose of taking new measurements at each time step compensate for : unmeasured disturbances model inaccuracy that causing the measured system output to be different from the one predicted by the model

5
Why PID? simple control structures strong robustness high reliability easy to implement widely used for most industrial control systems

6
Why PID & GPC? PID control cannot achieve desirable effects: the practical production processes are often nonlinear and time-varying To take the advantages of both GPC and PID, it is feasible to combine them together to form up(PID- GPC), by adding proportion, integral and differential structure to the conventional cost function.
, by adding proportion, integral and differential structure to the conventional cost function..")
7
MPIC Proposed by Towhidkhah 1996. (Grid Method) Kordari, 1380.(Gradient Method): Cost function: Gradient method:
 Kordari, 1380.(Gradient Method): Cost function: Gradient method:.")
8
Auto-Tuned PID Controller Using GPC PIDcontrol gains are automatically tuned by using a MPC method Auto-Tuned PID Controller Using a Model Predictive Control Method for the Steam Generator Water Level by Man Gyun Na IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 2001,cited 34.

9
Cost function CARIMA model

10
The optimal prediction is derived by solving a Diophantine equation, whose solution can be found by an efficient recursive algorithm. Diophantine equation:

11
There exist unique polynomials by By taking and

12
It was proven that stability could be guaranteed if the horizons and input-weighting factor were correctly chosen.(Clarke & Mohtadi,1989)
")
13
If a controlled process is a second-order linear system:

14
The first optimal control input is

15
A standard PID controller can be expressed as

16
Hierarchical structure control Incorporating GPC into the PID controller because of: Once GPC are adopted, the existing equipment, especially hardware parts, has to be upgraded at a large cost. The engineering level and the complicated algorithm will prohibit the implementation of the advanced control method. The advanced tuning methods usually lack explicit specifications and the plant operators are unfamiliar with the parameters tuning.

17
consists of two levels: 1. basic level: PID controller, which is not likely to give satisfactory performance as operating conditions change 2. optimization level the closed loop performance equals that of the standard GPC the practical controller still remains a PID structure to plant personnel The drawback of the conventional PID controller is that it has three degrees of freedom in tuning, which is difficult for plant engineers to tune the parameters to meet different specifications.

18
PID controller in the basic level: CARIMA model: Cost function

19
the optimal parameter vector for minimization of To achieve an optimal control variable at time interval k, a second-order Taylor expansion is given by

20
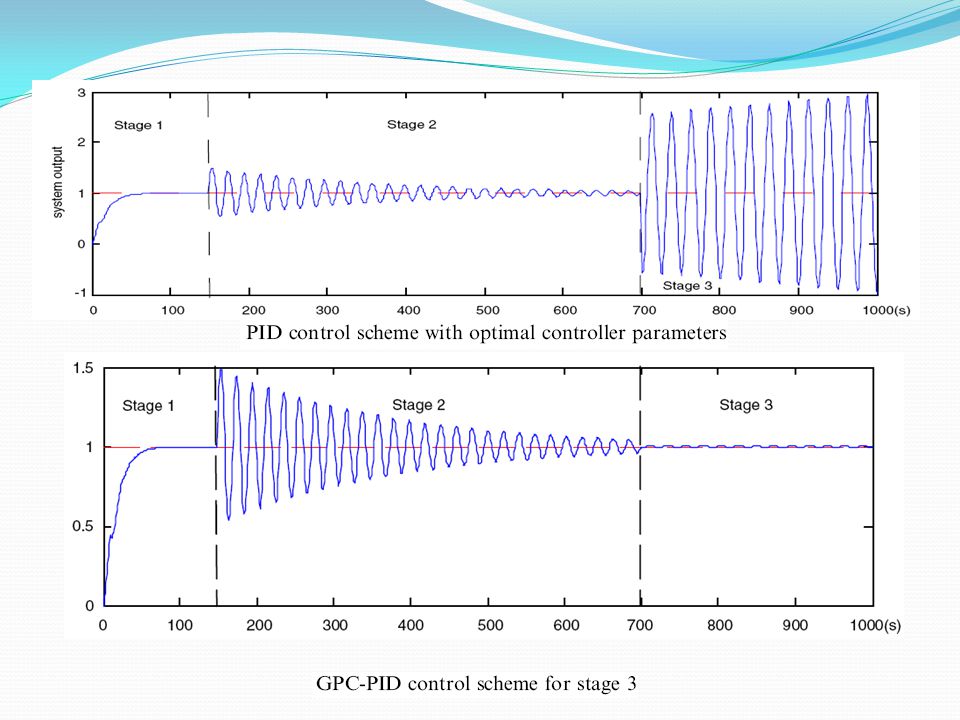
Simulation HVAC: heating, ventilation and air-condition it is common for a cooling coil unit to be controlled to maintain the supply air temperature Tao at a set point value This is a non-linear model, and the model is linearized at three different operating condition

22
Stage1: a short rise time and no overshoot Stage2: a large oscillation Stage3: a large oscillation because conventional PID controller is chosen based on the stage 1 operating condition, system performance is unsatisfied for different operating condition.

25
To verify the robustness to disturbance, a white noise with 0.1 dithers are introduced in the controlled loop. a satisfied control performance with small oscillation is obtained.

26
Proposed new cost function with PID parameters Conventional cost function: New cost function: Prediction:

28
Optimal solution

29
An improved PID-GPC algorithm GUANG-YI CHEN, PING REN, HAI-LONG PEI,2008 mathematical difficulties: 1. requirement of the solutions of a set of Diophantine equations 2. inversion computation of higher dimensional matrix 3. increasing the computation quantity in PID-GPC algorithm To broaden the application of PID-GPC, improving the control algorithm by: lightening computational burden simplifying the complexity of online implementation

30
Improvement It is assumed that the control increment has little change out of control horizon, that is Δu(t+j)=0, (j>NU). making the control increment Δu(t+j) (j=0,1,2,…,NU-1) tend to 0 in NU steps smoothly
 (j=0,1,2,…,NU-1) tend to 0 in NU steps smoothly.")
32
is a matrix of the dimension NU×NU, and its inverse operation is very complex. just a scalar. that is just picking the reciprocal of a number

33
simulation

34
with the same value of k,the bigger the value of q,the faster of the systems output response during the initial time

35
with the same value of q,the smaller the value of k, the faster of the systems output response during the initial time.

36
There is no overshoot in improved PID-GPC, although it has a relatively slower output response.

37
the control variance is significantly smaller in improved GPC-PID The improved algorithm has the advantages of good control performance, less on line computation, and good application prospect.

38
Thanks

Similar presentations






>")
















