Download presentation
Presentation is loading. Please wait.

1
The evolution of time-delay models for high-performance manufacturing The evolution of time-delay models for high-performance manufacturing Gábor Stépán Department of Applied Mechanics Budapest University of Technology and Economics

2
Contents (1900…) 1950… -turning - single discrete delay (RDDE) -process damping- distributed delay (RFDE) -nonlinearities- bifurcations in RFDE -milling - non-autonomous RDDE -varying spindle speed- time-periodic delay -high-performance - state-dependent delay -forging- neutral DDE …2006
 1950… -turning - single discrete delay (RDDE) -process damping- distributed delay (RFDE) -nonlinearities- bifurcations in RFDE -milling - non-autonomous RDDE -varying spindle speed- time-periodic delay -high-performance - state-dependent delay -forging- neutral DDE …2006")
3
Motivation: Chatter ~ (high frequency) machine tool vibration … Chatter is the most obscure and delicate of all problems facing the machinist – probably no rules or formulae can be devised which will accurately guide the machinist in taking maximum cuts and speeds possible without producing chatter. (Taylor, 1907).
..")
5
Efficiency of cutting Specific amount of material cut within a certain time where w – chip width h – chip thickness Ω ~ cutting speed

6
Efficiency of cutting Specific amount of material cut within a certain time where w – chip width h – chip thickness Ω ~ cutting speed surface quality

8
Time delay models Delay differential equations (DDE): - simplest (populations) Volterra (1923) - single delay (production based on past prices) - average past values (production based on statistics of past/averaged prices) -weighted w.r.t. the past (Roman law)
.")
9
Modelling – regenerative effect Mechanical model (Tlusty 1960, Tobias 1960) τ – time period of revolution Mathematical model
 τ – time period of revolution Mathematical model")
10
Linear analysis – stability Dimensionless time Dimensionless chip width Dimensionless cutting speed

11
Delay Diff Equ (DDE) – Functional DE Time delay & infinite dimensional phase space: Myshkis (1951) Halanay (1963) Hale (1977) Riesz Representation Theorem
 – Functional DE Time delay & infinite dimensional phase space: Myshkis (1951) Halanay (1963) Hale (1977) Riesz Representation Theorem")
12
The delayed oscillator Pontryagin (1942) Nyquist (1949) Bellman & Cooke (1963) Olgac, Sipahi Hsu & Bhatt (1966) (Stepan: Retarded Dynamical Systems, 1989)
 Nyquist (1949) Bellman & Cooke (1963) Olgac, Sipahi Hsu & Bhatt (1966) (Stepan: Retarded Dynamical Systems, 1989)")
13
Stability chart of turning But: better stability properties experienced at low and high cutting speeds!

14
Short regenerative effect Stepan (1986)
")
15
Weight functions

16
Experiments Usui (1978) Bayly (2000) Finite Elements Ortiz (1995) Analitical Davies (1998)
 Bayly (2000) Finite Elements Ortiz (1995) Analitical Davies (1998)")
17
Nonlinear cutting force ¾ rule for nonlinear cutting force Cutting coefficient

18
The unstable periodic motion Shi, Tobias (1984) – impact experiment
 – impact experiment")
19
Case study – thread cutting (1983) m= 346 [kg] k=97 [N/μm] f n =84.1 [Hz] ξ=0.025 gge=3.175[mm]
![Case study – thread cutting (1983) m= 346 [kg] k=97 [N/μm] f n =84.1 [Hz] ξ=0.025 gge=3.175[mm]](http://images.slideplayer.com/5/1507971/slides/slide_19.jpg "Case study – thread cutting (1983) m= 346 [kg] k=97 [N/μm] f n =84.1 [Hz] ξ=0.025 gge=3.175[mm]")
20
Machined surface D=176 [mm], τ =0.175 [s]
![Machined surface D=176 [mm], τ =0.175 [s]](http://images.slideplayer.com/5/1507971/slides/slide_20.jpg "Machined surface D=176 [mm], τ =0.175 [s]")
21
Stability and bifurcations of turning Hale (1977) Hassard (1981) Subcritical Hopf bifurcation (S, 1997): unstable vibrations around stable cutting
 Hassard (1981) Subcritical Hopf bifurcation (S, 1997): unstable vibrations around stable cutting")
22
Bifurcation diagram

23
Phase space structure

24
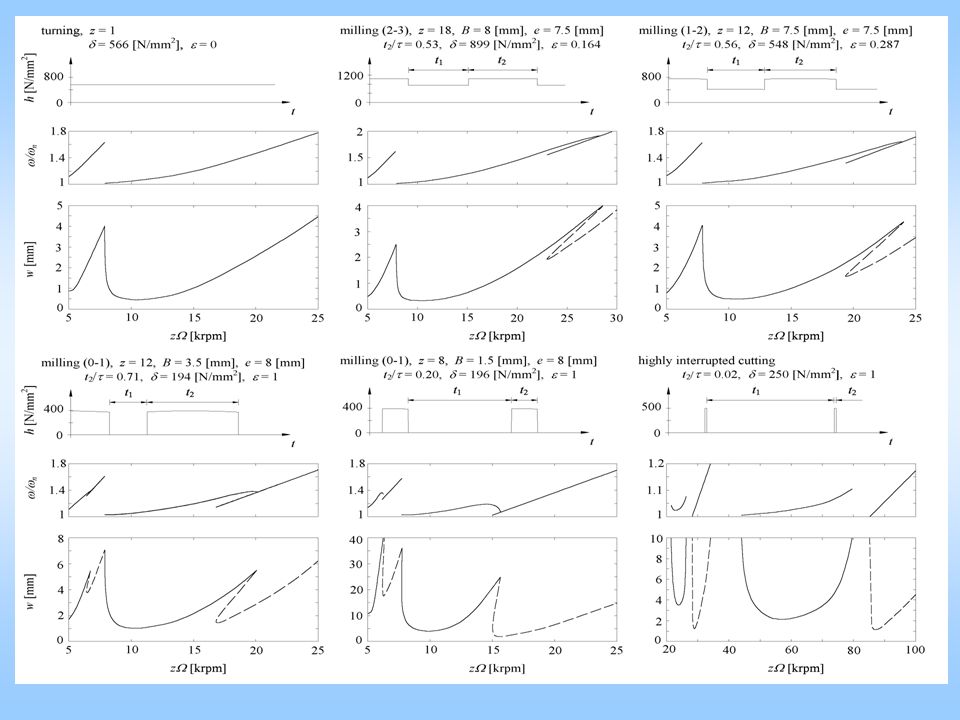
Milling (1995 - ) Mechanical model: - number of cutting edges in contact varies periodically with period equal to the delay
 Mechanical model: - number of cutting edges in contact varies periodically with period equal to the delay")
25
The delayed Mathieu – stability charts b=0 (Strutt, 1928) ε=1 ε=0 (Hsu, Bhatt, 1966)
 ε=1 ε=0 (Hsu, Bhatt, 1966)")
26
Stability chart of delayed Mathieu Insperger, Stépán (2002)
")
27
Test of damped delayed Mathieu equ.

29
Measured and processed signals ABCABC

30
Phase space reconstruction A – secondary B – stable cutting C – period-2 osc. Hopf (tooth pass exc.) (no fly-over!!!) noisy trajectory from measurement noise-free reconstructed trajectory cutting contact(Gradisek,Kalveram)
 (no fly-over!!!) noisy trajectory from measurement noise-free reconstructed trajectory cutting contact(Gradisek,Kalveram).")
31
Animation of stable period doubling

32
Lenses

33
Stability chart = 0.05 … 0.1 … 0.2

34
Stability of up- and down-milling Stabilization by time-periodic parameters! Insperger, Mann, Stepan, Bayly (2002)
.")
35
Stabilization by time-periodic time delay Chatter suppression by spindle speed modulation:

36
Improved stability properties (Hard to realize…)
")
37
State dependent regenerative effect

38
State dependent time delay (x t ): Without state dependence (at fixed point): Trivial solution: With state dependence, the chip thickness is, f z – feed rate, Krisztin, Hartung (2005), Insperger, S, Turi (2006)
: Without state dependence (at fixed point): Trivial solution: With state dependence, the chip thickness is, f z – feed rate, Krisztin, Hartung (2005), Insperger, S, Turi (2006)")
39
2 DoF mathematical model Linearisation at stationary cutting (Insperger, 2006) Realistic range of parameters: Characteristic function
 Realistic range of parameters: Characteristic function")
40
Stability charts – comparison

41
Forging Lower tup: 105 [t] (Upper tup: 21 [t] hammer)
![Forging Lower tup: 105 [t] (Upper tup: 21 [t] hammer)](http://images.slideplayer.com/5/1507971/slides/slide_41.jpg "Forging Lower tup: 105 [t] (Upper tup: 21 [t] hammer)")
43
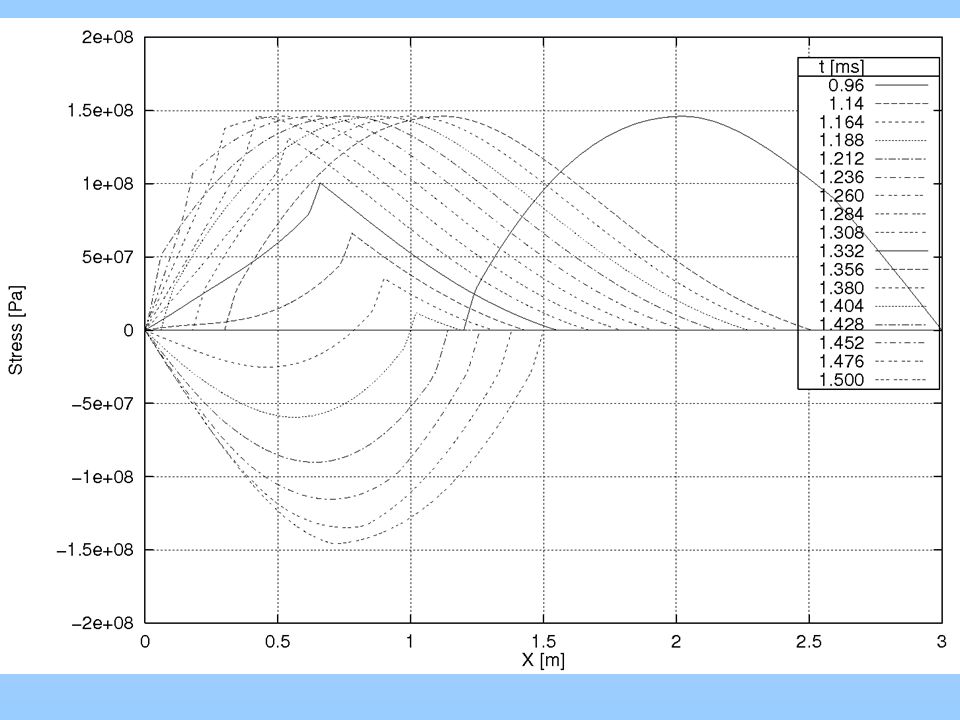
with boundary conditions Initial conditions: Traveling wave solution

44
Neutral DDE With initial function

46
Impact – elastic & plastic traveling waves

Similar presentations




>")









>")




>")


