Download presentation
Presentation is loading. Please wait.

2
Global Optimization General issues in global optimization Classification of algorithms The DIRECT algorithm – Relationship to EGO – Lipschitzian optimization – Exploration and Exploitation – Application to High Speed Civil Transport

3
Global optimization issues Optimization problem is NP-hard No-free-lunch theorem (Wolpert and Macready) – No single algorithm can do well on all problems – If an algorithm is improved for one problem, it will suffer for others. Great opportunity for engineers to use problem knowledge to tailor algorithms. Big headache for journals because they get many worthless new algorithms.

4
Global Optimization Global optimization algorithms by Thomas Weise

5
Global trend If there is global trend, the only issue is not to be trapped in a local minimum If there are many important basins there is no choice but to explore thoroughly.

6
global optimization algorithms

7
EGO and DIRECT EGO is an algorithm that relies on a surrogate to connect all the data in design space. DIRECT is an algorithm that does not try to exploit any correlation between the function value at one point and its value at nearby points. EGO will do well for functions with global trend and not too many deep local optima. DIRECT will do well for cheap functions with many local optima. We combine them by using DIRECT to calculate new sampling points for EGO.

8
DIRECT Algorithm Jones, D.R., Perttunen, C.D. and Stuckman, B.E. (1993), Lipschitzan optimization without the Lipschitz constant, Journal of Optimization Theory and Application 79, 157–181. S. E. COX, R. T. HAFTKA, C. A. BAKER, B. GROSSMAN, W. H. MASON and L. T. WATSON A Comparison of Global Optimization Methods for the Design of a High-speed Civil Transport, Journal of Global Optimization 21: 415–433, 2001. Matlab: http://www4.ncsu.edu/~ctk/Finkel_Direct/http://www4.ncsu.edu/~ctk/Finkel_Direct/
, Lipschitzan optimization without the Lipschitz constant, Journal of Optimization Theory and Application 79, 157–181. S. E. COX, R. T. HAFTKA, C. A. BAKER, B. GROSSMAN, W. H. MASON and L. T. WATSON A Comparison of Global Optimization Methods for the Design of a High-speed Civil Transport, Journal of Global Optimization 21: 415–433, Matlab:")
9
Lipschitzian Optimization Optimizer divides space into boxes and samples the vertices of each One box is further divided based on a predicted maximum rate of change of the function, K

10
DIRECT The function value at the middle of each box and its largest dimension are used to determine potentially optimal boxes Each potentially optimal box is divided Lipschitzian optimization for all possible Lipschitz constants

11
DIRECT Box Division.

12
Exploration vs. Exploitation DIRECT uses convex hull of box sizes to balance exploitation vs. exploration. With enough function evaluations every region in design space will be explored. This is clearly not feasible for high dimensional spaces. Coxs paper compares DIRECT to repeated local optimization with random starts.

13
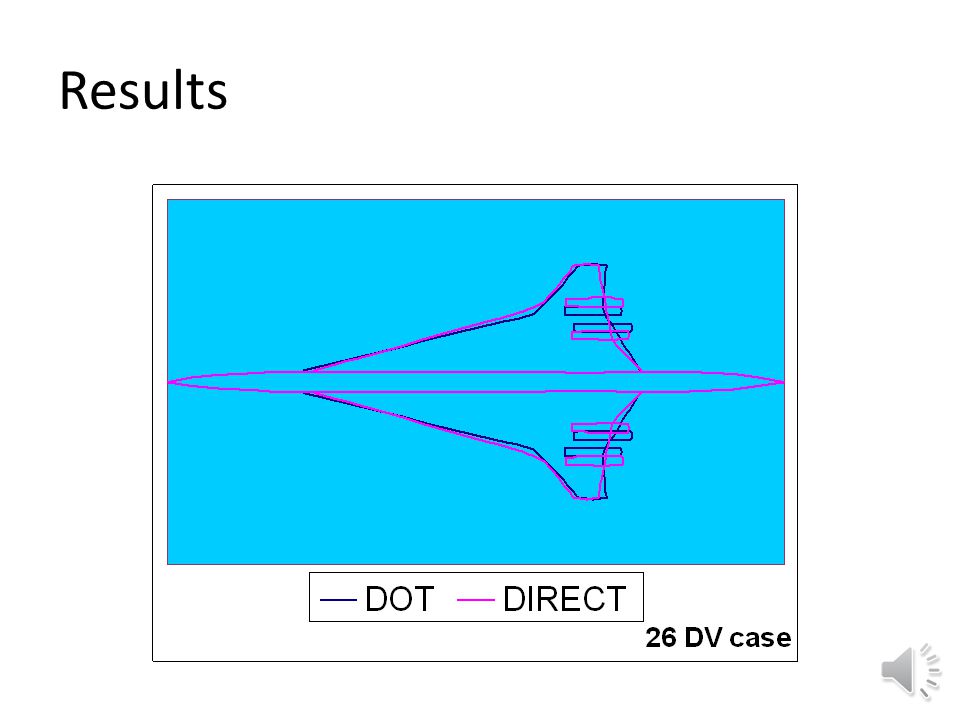
Optimization of a High Speed Civil Transport 26 design variables defining the shape of the wing and fuselage and tail and the flight trajectory Long range (NY Tokyo type flight) with 250 passengers for minimum takeoff gross weight Constraints on takeoff and landing maneuvers, engine out conditions. CFD analysis plus structural optimization needed for each design.

14
Results

Similar presentations



 1 Chapter 12 Cross-Layer.>")
 Fakultät für Informatik TU Dortmund.>")
 Professor:>")















