Download presentation
Presentation is loading. Please wait.

1
ANOTHER CLOSE ENCOUNTER: WHEN PAINLEVÉ I MEETS THE WAVE EQUATION R. GLOWINSKI & A. QUAINI

2
1.INTRODUCTION Few months ago, while cleaning my office desk, I found a 2010 issue of the Notices of the AMS mentioning a newly started Painlevé Project, this project being a cyber meeting point for those scientists interested by all aspects of the six transcendent Painlevé equations. Intrigued by such a project, I went to WIKIPEDIA where I learnt that the 6 Painlevé equations read as (with j = 1, 2, …, 6) R j being a complex-valued rational function of its three arguments. In this lecture, we will focus on the 1 st Painlevé equation (Painlevé I), namely:
 R j being a complex-valued rational function of its three arguments. In this lecture, we will focus on the 1 st Painlevé equation (Painlevé I), namely:.")
3
If y(0) = 0 and (dy/dt)(0) = 0, the graph of the solution looks like (with explosion (blow-up) at t ≈ 2.5):
 = 0 and (dy/dt)(0) = 0, the graph of the solution looks like (with explosion (blow-up) at t ≈ 2.5):")
5
Despite the fact that the 6 Painlevé equations occur in many applications, from Mechanics and Physics in particular, it seems that that there is still much to do concerning their numerical solution. A recent contribution in that direction is: B. FORNBERG & J.A.C. WEIDEMAN, A numerical methodology for the Painlevé equations, J. Comp. Phys., 230(15), 2011, 5957-5973. Our goal here is more modest: it consists in investigating the numerical solution of the following nonlinear wave equation, where Is a bounded domain of R 2 :
, 2011, Our goal here is more modest: it consists in investigating the numerical solution of the following nonlinear wave equation, where Is a bounded domain of R 2 :.")
7
and to study the dependence of the solutions with respect to c and the boundary conditions. Paul Painlevé (1863-1933) was twice France Prime Minister (it is reasonable to assume that Painlevé went to Politics because Mathematics were too easy for him*, the same way that J. Von Neumann went to Physics, since, according to P. Lax, Mathematics were also too easy for him). It is worth mentioning that ‘the’ Emile Borel was Secretary of the Navy in both Painlevé “cabinets ministeriels”, a most important information since J.L. Lions, and therefore his many PhD students (several of them are attending this conference), are E. Borel descendants (as are their own PhD students).
 was twice France Prime Minister (it is reasonable to assume that Painlevé went to Politics because Mathematics were too easy for him*, the same way that J. Von Neumann went to Physics, since, according to P. Lax, Mathematics were also too easy for him). It is worth mentioning that ‘the’ Emile Borel was Secretary of the Navy in both Painlevé cabinets ministeriels , a most important information since J.L. Lions, and therefore his many PhD students (several of them are attending this conference), are E. Borel descendants (as are their own PhD students)..")
8
Paul Painleve

9
2. RELATED PROBLEMS In the Chapter I of his celebrated 1969 book “Quelques Méthodes de Résolution des Problèmes aux Limites Non Linéaires”, J.L. Lions presents existence and non-existence results from D. Sattinger, J.B. Keller & H. Fujita concerning the solutions of the following nonlinear wave equation Concerning the solution of nonlinear parabolic equations with blow-up let us mention

10
A.A. SAMARSKII, V.A. GALAKTIONOV, S.P. KURDYUMOV & A.P. MIKHAILOV, Blow-Up in Quasi-Linear Parabolic Equations, 1995 3. An operator-splitting approach to the numerical solution of the Painlevé I – Wave Equation problem The problem under consideration being ‘multi-physics’ (reaction-propagation type) and multi-time scales, an obvious candidate for its time discretization is the Strang’s Symmetrized Operator-Splitting Scheme (SSOS Scheme), that scheme being a reasonable compromise between simplicity, robustness and accuracy (more sophisticated, but more complicated, O.–S. schemes are available). In order to apply the SSOS scheme to the solution of our Painlevé I – Wave Equation problem, the 1 st step is to write the above problem as a 1 st order in time PDE system. To do so, we introduce p = u/ t, obtaining thus if we take u = 0 on (0, T max ) as boundary condition:
 and multi-time scales, an obvious candidate for its time discretization is the Strang’s Symmetrized Operator-Splitting Scheme (SSOS Scheme), that scheme being a reasonable compromise between simplicity, robustness and accuracy (more sophisticated, but more complicated, O.–S. schemes are available). In order to apply the SSOS scheme to the solution of our Painlevé I – Wave Equation problem, the 1 st step is to write the above problem as a 1 st order in time PDE system. To do so, we introduce p = u/ t, obtaining thus if we take u = 0 on (0, T max ) as boundary condition:.")
11
With t > 0 a time-discretization step, t n+ = (n+ ) t, and , (0, 1) with + = 1, we obtain by application of the SSOS scheme:
 t, and , (0, 1) with + = 1, we obtain by application of the SSOS scheme:")
12
(1) u 0 = u 0, p 0 = u 1. For n 0, {u n, p n } {u n+1, p n+1 } via (2.1) {u n+1/2, p n+1/2 } = {u(t n+1/2 ), p(t n+1/2 )}, {u, p} being the solution of (2.2)
 {u n+1/2, p n+1/2 } = {u(t n+1/2 ), p(t n+1/2 )}, {u, p} being the solution of (2.2).")
13
(3.1) {u, p} being the solution of (3.2)
 {u, p} being the solution of (3.2)")
14
(4.1) {u, p} being the solution of (4.2) By (partial) elimination of p, we obtain the following O.S. scheme:

15
(5) u 0 = u 0, p 0 = u 1. For n 0, {u n, p n } {u n+1, p n+1 } via (6.1) u being the solution of (6.2)
 u being the solution of (6.2).")
16
(7.1) with u the solution of (7.2)
 with u the solution of (7.2)")
17
(8.1) u being the solution of (8.2)
 u being the solution of (8.2)")
18
4. On the solution of the linear wave-suproblems At each time-step, we have to solve a linear wave problem of the following type: (LWE) We assume that 0 H 1 0 (Ω) and 1 L 2 (Ω). A variational formulation of (LWE), well-suited to finite element implementation, is given by (LWE-V) :
 We assume that 0 H 1 0 (Ω) and 1 L 2 (Ω). A variational formulation of (LWE), well-suited to finite element implementation, is given by (LWE-V) :.")
19
where denotes the duality pairing between H – 1 (Ω) and H 1 0 (Ω). Next, assuming that Ω is a bounded polygonal sub-domain of R 2, we introduce a triangulation T h of Ω and the following finite dimensional finite element approximation of the space H 1 0 (Ω) :
 :.")
20
P 1 being the space of the two variable polynomials of degree ≤ 1. We approximate (LWE-V) by (LWE-V) h defined as follows: with 0h and 1h both belonging to V h and approximating 0 and 1, respectively.
 by (LWE-V) h defined as follows: with 0h and 1h both belonging to V h and approximating 0 and 1, respectively..")
21
Let us denote by N h the set of the interior vertices P j of T h (we have N h = dim V h ) and by h (t) the N h – dimensional vector We have then Above, the mass matrix M h and the stiffness matrix A h are both symmetric and positive definite. Now, let Q be a positive integer and define τ by

22
For the time-discretization, we advocate the following non-dissipative second order accurate centered scheme (the subscripts h have been omitted): The stability condition of the above scheme is given by where N is the largest eigenvalue of M –1 A ( = O(h –2 ) here).
: The stability condition of the above scheme is given by where N is the largest eigenvalue of M –1 A ( = O(h –2 ) here).")
23
5. On the solution of the nonlinear suproblems At each time step of the Strang symmetrized scheme and for every vertex of T h we have to solve two initial value problems of the following type: (NLOD2) Let M be a positive integer; we denote (t f – t 0 )/M by and t 0 + m by t m. We approximate then (NLOD2) by
 Let M be a positive integer; we denote (t f – t 0 )/M by and t 0 + m by t m. We approximate then (NLOD2) by.")
24
The above scheme can be obtained by limiting to the second order the following Taylor expansion (TE) m
 m")
25
We can use the 3 rd order term in (TE) m to adapt by observing that We advocate then the following adaptation strategy: (i) If keep integrating with (a typical value of tol being 10 – 4 ).
 m to adapt by observing that We advocate then the following adaptation strategy: (i) If keep integrating with (a typical value of tol being 10 – 4 ).")
26
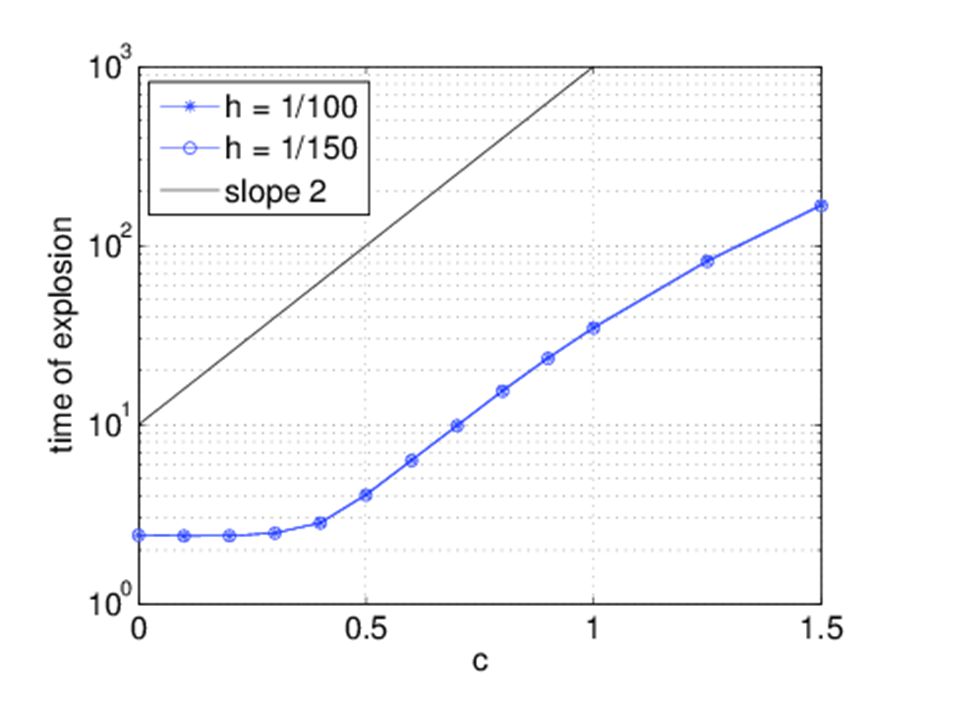
(ii) If the above inequality is not verified, divide by 2, as many times as necessary to have the above error estimator less than 0.2 tol. 6. NUMERICAL EXPERIMENTS All with Ω = (0, 1) 2, Δx 1 = Δx 2 = 1/100 and 1/150, c Δt ≈ ½ Δx, Q = 3, and M = 3 (initially), α = β = ½. Initial conditions: u 0 = 0, u 1 = 0. 6.1. Dirichlet Boundary conditions Roughly speaking, the blow up time is of the order of c 2 (we stopped computing as soon as the max of the approximate solution reached 10 4 ). The results for both space discretization steps are essentially identica l.
 2, Δx 1 = Δx 2 = 1/100 and 1/150, c Δt ≈ ½ Δx, Q = 3, and M = 3 (initially), α = β = ½. Initial conditions: u 0 = 0, u 1 = Dirichlet Boundary conditions Roughly speaking, the blow up time is of the order of c 2 (we stopped computing as soon as the max of the approximate solution reached 10 4 ). The results for both space discretization steps are essentially identica l..")
27
c = 0

28
u, c = 0.8

29
p, c = 0.8

31
f = 0.9 Hz

33
6.2. Dirichlet-Sommerfeld Boundary conditions Consider Γ 1 = {{x 1, x 2 }| x 1 = 1, 0 < x 2 < 1}, Γ 0 = ∂Ω\Γ 1 and take as boundary conditions For the same value of c the blow-up time is shorter than for pure homogeneous Dirichlet boundary conditions.

34
u, c = 0.8

35
p, c = 0.8

39
I don’t want to be polemical but I think that monolithic (un-split) schemes will have troubles at handling this nonlinear wave problem. By the way the approach discussed here is highly parallelizable. Thank you for your attention

Similar presentations
















 where Multiply equation (1) by and then integrate over the domain Green’s theorem gives.>")





. 1. Motivation For those participants wondering why we start a course dedicated to nonlinear problems by.>")
. Conjugate Gradient Algorithms for Linear Variational Problems in Hilbert Spaces 1.Introduction. Synopsis.>")
>")
