Download presentation
Presentation is loading. Please wait.

1
MAV Optical Navigation Software System April 30, 2012 Tom Fritz, Pamela Warman, Richard Woodham Jr, Justin Clark, Andre DeRoux Sponsor: Dr. Adrian Lauf

2
Background – Micro Aerial Vehicles (MAVs) A subset of Unmanned Aerial Vehicles (UAVs) – Predator – Raptor Very small, maneuverable, and lightweight MAV Categories – Fixed-wing – Rotary-wing – Flapping-wing Used for homeland security & battlefield applications – Surveillance – Reconnaissance
 A subset of Unmanned Aerial Vehicles (UAVs) – Predator – Raptor Very small, maneuverable, and lightweight MAV Categories – Fixed-wing – Rotary-wing – Flapping-wing Used for homeland security & battlefield applications – Surveillance – Reconnaissance")
3
Flapping-Wing MAV

4
Purpose Develop an optical navigation software subsystem – User selectable destination – Semi-autonomous operation – Adaptable for flapping-wing MAVs – Operates in closed, static environment Classroom with tables and chairs No moving objects

5
Project Concept Develop a software navigation system using a camera that will eventually be used on an MAV Current testing and implementation will be using a wired webcam to prove functionality

6
System Requirements and Restrictions Requirements: – Create 3D model of the environment – Plan a path from current location to a selected destination – Communicate real-time navigation output – Work in any closed, static environment Restrictions – Monocular camera

7
Hardware Overview

8
Camera Restrictions: – Low Resolution – 30 frames per second Usage: – A video is comprised of static pictures (frames) that are streamed together to mimic real time motion. – A simplified example is a flipbook. – Different calculations are based on differenced from each frame to the next.

9
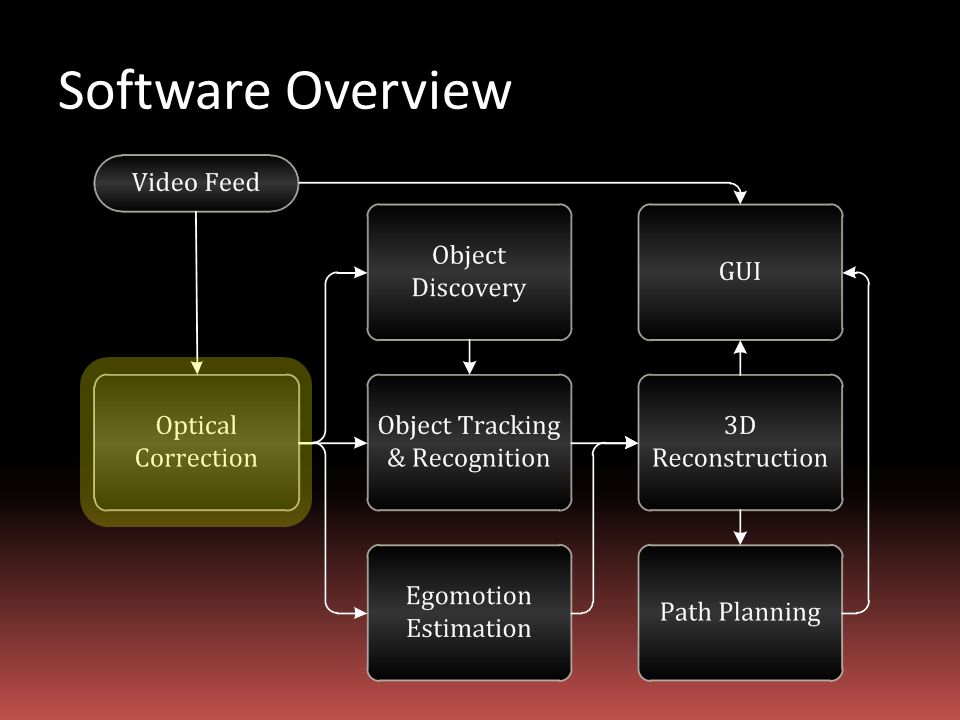
Software Overview

11
Software Overview Fall 2011

12
Software Overview Spring 2012

13
Object Discovery

14
Goal: Find prominent objects in view Purpose: – Initialize bounding box for object tracking & recognition module – Initialize landmarks Execution: – “Snake” algorithm – Blob Detection (New)
")
15
Object Discovery Algorithm

16
Blob Detection Purpose: To assist with finding the contours of objects for the Snake Algorithm Execution: – Convert image to binary image – Apply Thresholding – Smooth the Filter-Median

17
Snake (Active Contour) Actual Image
 Actual Image")
18
Threshold Image Purpose – To remove and ignore all other color from objects in the image except the colors specified. (ex. Red, Blue, Green) Proceess – – Use opencv function InRangeS() to select color range – Use opencv function Smooth and Erode to form blob
 Proceess – – Use opencv function InRangeS() to select color range – Use opencv function Smooth and Erode to form blob.")
19
Snake (Active Contour W/Blobs) Threshold Image
 Threshold Image")
20
Blob Detection Advantages – Very fast – Accurate – Can locat multiple objects in view Disadvantages – Does not track objects but simply redraws bounding boxes each frame – Does not work well with more difficult objects only simple one colored objects

21
Blob Detection Demonstration

22
Object Recognition and Tracking

23
Object Tracking & Recognition Goal: Create an object model Purpose: Help self-location Execution: – Tracking: Lucas-Kanade short term tracker – Recognition: Random forest machine learning using Haar features

24
Object Tracking & Recognition

25
Egomotion Estimation

26
Goal: Estimate the Egomotion of the camera Purpose: – Estimate the 3D motion of the camera “How has the camera moved?” – Provide information that can lead to 3D reconstruction Execution: – Optical Flow Lucas-Kanade Other Optical Flow methods Farneback dense Optical Flow

27
Egomotion Estimation

28
Optical Flow Definition: The pattern of apparent motion of objects, surfaces, and edges in a visual scene. Purpose: – Calculate the motion of points from frame to frame “How much has a point in a frame moved since the last frame.” – Provides data for 3D reconstruction and Egomotion Estimation Future work: – Use Optical Flow data for accurate Egomotion estimation – Test calculated values using Egomotion Emulator

29
Optical Flow Example Generated Using Lucas-Kanade Optical Flow Method

30
3D Reconstruction

31
Goal: Create a 3D map of the environment Purpose: – Determine the 3D map of the environment – Provide information that can lead to Path Planning Execution: – Future work needed – Structure From Motion, Stereo Vision Techniques

32
Object Recognition and Tracking

33
Path Planning Goal: Plan a path from one location to the next location Purpose: – Plan a path to a user specified location – Use the 3D reconstruction Execution: – Future work needed

34
Test bed Approach Purpose Simulates predetermined motion and captures truth data for comparison with the calculated Egomotion software Egomotion estimation module (software) Provide precise motion for one rotational axis and three translational axes (X,Y,Z) Hardware of Emulator Lego Mindstorms® kit utilized to create emulator Controller MIT HandyBoard Programmed in Interactive C LCD for controller feedback
 Provide precise motion for one rotational axis and three translational axes (X,Y,Z) Hardware of Emulator Lego Mindstorms® kit utilized to create emulator Controller MIT HandyBoard Programmed in Interactive C LCD for controller feedback")
35
3 Axis Egomotion Emulator

36
Design Considerations Cost Lego Mindstorms borrowed $0 Small 12” x 13”CNC machine cost about $3k Actual MAV is approx. $15k Input Simulate motion via predetermined paths Line follow via Infrared (IR) sensors Output IR sensor on each axes of translation 1 cm resolution (accuracy) LCD screen on controller for real time feedback
 sensors Output IR sensor on each axes of translation 1 cm resolution (accuracy) LCD screen on controller for real time feedback.")
37
Testing Procedures Setup Assemble three sections (X,Y,Z) Necessary due to storage and portability Power on Controller and connect to PC via USB Download appropriate source code to controller Calibrate IR sensors values in source code for accurate feedback (IR_tester.ic) Testing Run program and collect data from controller LCD screen and compare with calculated Egomotion estimation data
 Necessary due to storage and portability Power on Controller and connect to PC via USB Download appropriate source code to controller Calibrate IR sensors values in source code for accurate feedback (IR_tester.ic) Testing Run program and collect data from controller LCD screen and compare with calculated Egomotion estimation data")
38
Controller

39
3-Axis Egomotion Emulator

41
Emulator Accomplishments Completed XYZ translation XYZ IR sensor data acquisition Future goals Rotation about Z axis Code predetermined paths via IR sensors to test with software

42
Questions?

43
3D Reconstruction

44
Path Planning

Similar presentations





, Jacob Schreiver (ECE), Justin Clark (CECS), & Nathan Armentrout (ECE) Sponsor: Dr. Adrian Lauf 1.>")
![Katie Dellaquila Jeremy Nelson Khiem Tong. Project Overview [KED] Multidisciplinary Aspects [KED] Motivation (Similar Products) [KED] System Schematic.](/15/4864593/big_thumb.jpg "Katie Dellaquila Jeremy Nelson Khiem Tong. Project Overview [KED] Multidisciplinary Aspects [KED] Motivation (Similar Products) [KED] System Schematic.>")



>")









>")