Download presentation
Presentation is loading. Please wait.

1
Manipulation in Human Environments
Aaron Edsinger & Charlie Kemp Humanoid Robotics Group MIT CSAIL

2
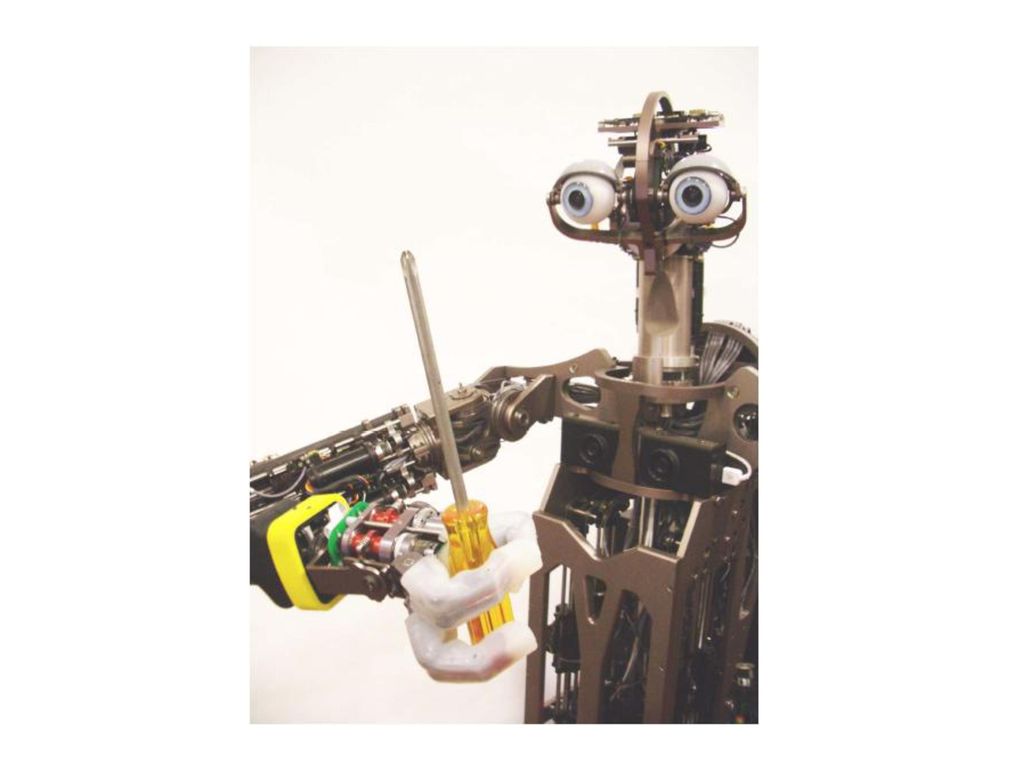
Domo

3
Manipulation in Human Environments
Work with everyday objects Collaborate with people

4
Applications Aging in place Cooperative manufacturing Household chores

5
Three Themes Use Your Body Social Manipulation Task relevant features

6
Use Your Body Simplify perception (tool tip, hand)
Test assumptions (flat surface) Compliance simplifies contact (Placing, Grasping and Transferring)
 Compliance simplifies contact (Placing, Grasping and Transferring)")
7
Structure In Human Environments
Sense from above Flat surfaces Objects for human hands Objects for use by humans Look the user in the eye Interpretable body Tall and narrow

8
Social Complementary action
Person can simplify perception and action for the robot Robot can cue the human intuitively (body language) Lot's of examples of tasks where a robot can be helpful without doing everything (robot doesn't have to solve everything to be helpful)
 Lot s of examples of tasks where a robot can be helpful without doing everything (robot doesn t have to solve everything to be helpful)")
9
Task Relevant Features
What is important? What is irrelevant? *Distinct from object detection/recognition.

10
Other Examples Donald Norman Circular openings Tips Handles
Contact Surfaces

11
Why are tool tips common?
Single, localized interface to the world Physical isolation helps avoid irrelevant contact Helps perception Helps control

12
Distinct Perceptual Problem
Not object recognition How should it be used Distinct methods and features

13
Generalize What You've Learned
Across objects Perceptually map tasks across objects key features -> key features Across manipulators Motor equivalence Manipulator details may be irrelevant

15
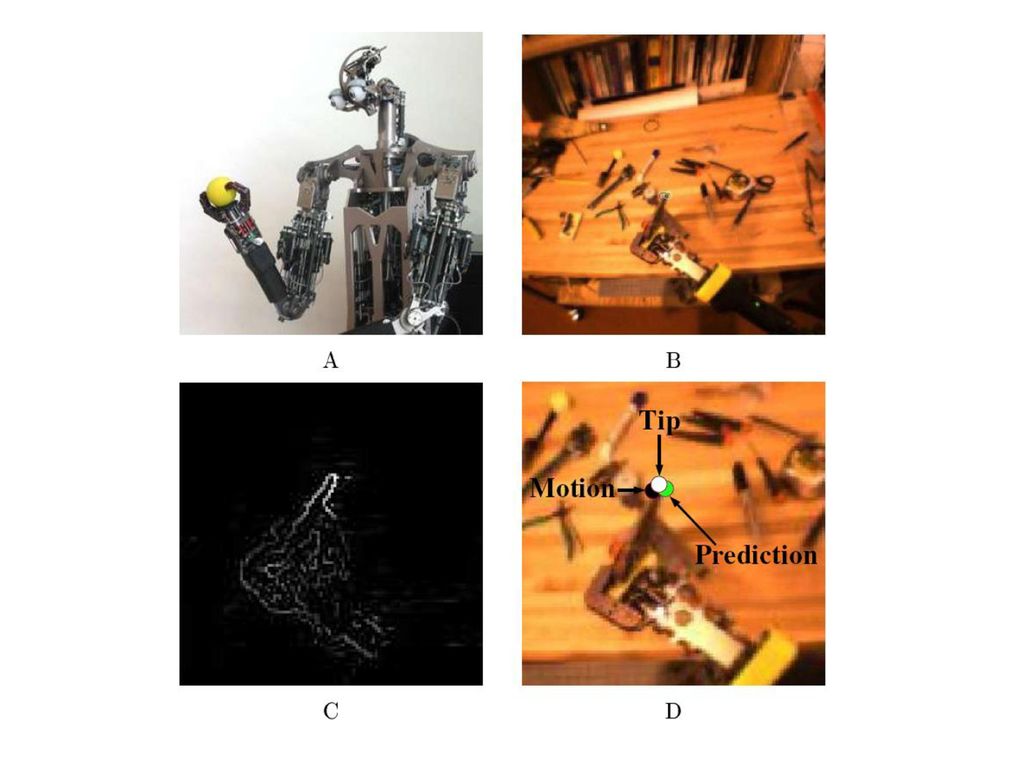
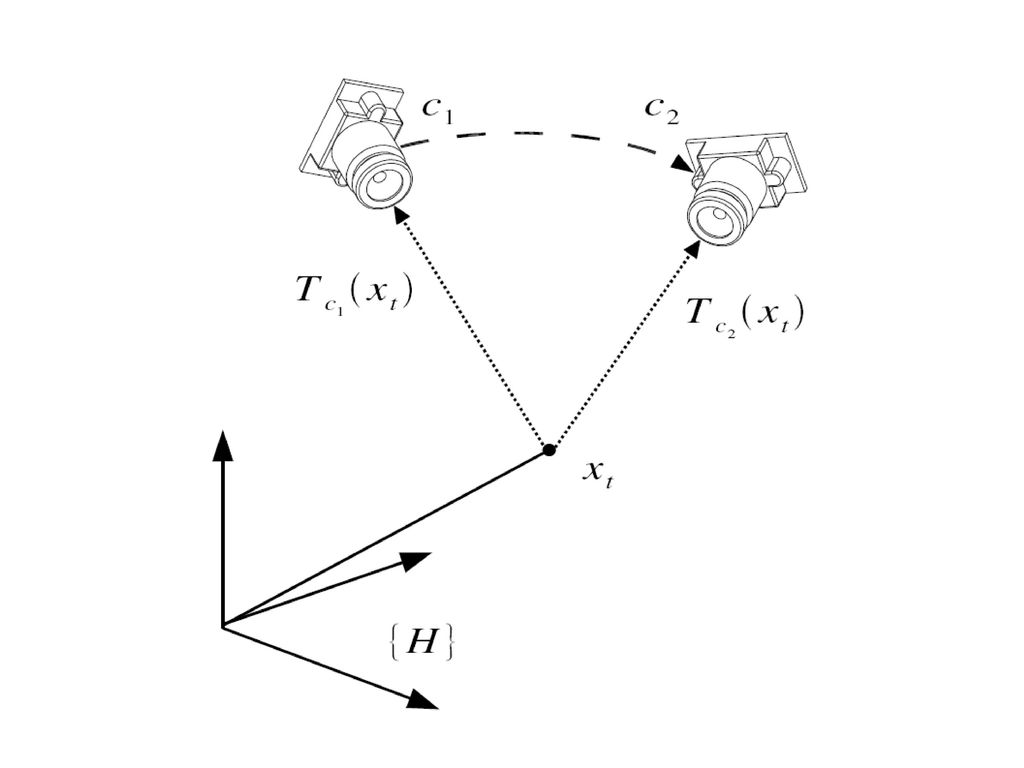
Tool Tip Detection Visual + motor detection method Kinematic Estimate
Visual Model

20
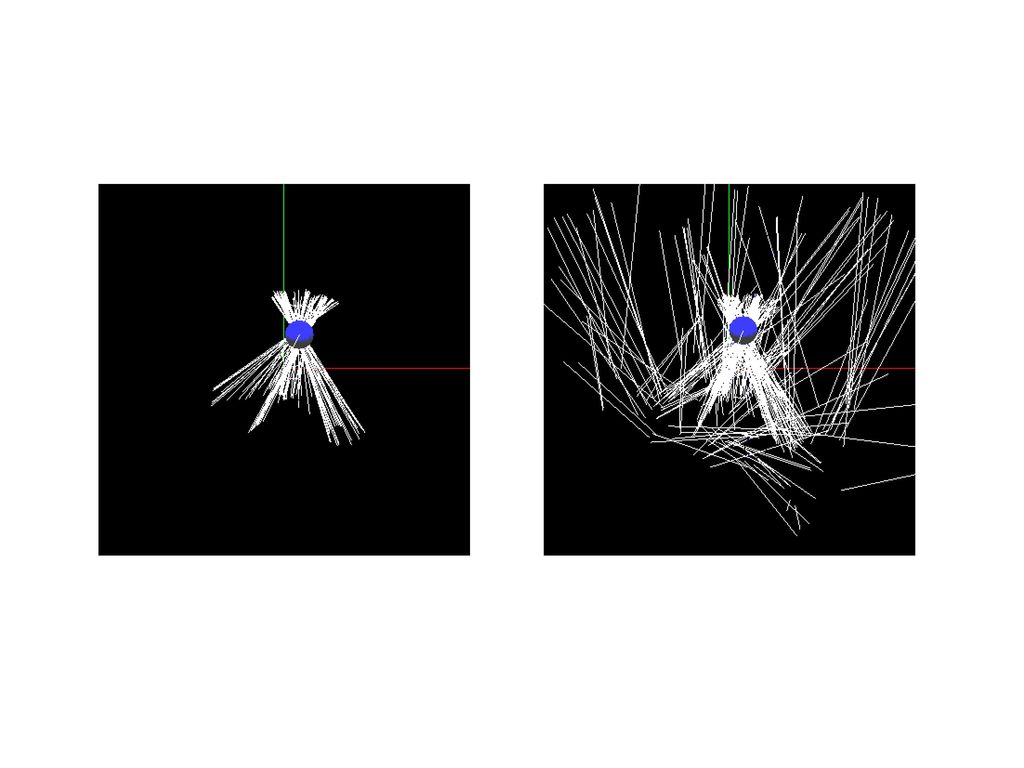
Acquire a Visual Model

21
Use The Hand's Frame Combine weak evidence Rigidly grasped

24
RSS 2006 Workshop Manipulation for Human Environments Much to be done!

25
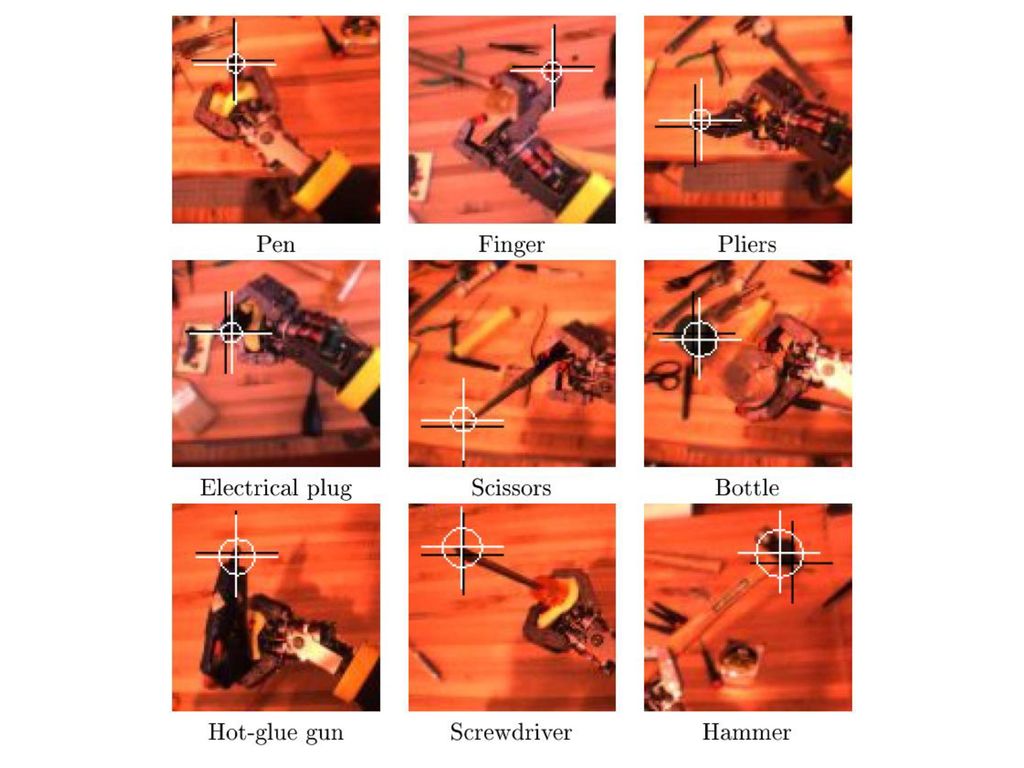
Summary Importance of Task Relevant Features Example of the tool tip
Large set of hand tools Robust detection (visual + motor) Kinematic estimate Visual model
 Kinematic estimate. Visual model.")
26
In Progress Perform a variety of tasks Insertion Pouring Brushing

27
Mean Pixel Error for Automatic and Hand Labeled Tip Detection
![]()
28
Mean Pixel Error for Hand Labeled, Multi-Scale Detector, and Point Detector
![]()
29
Learning from Demonstration

30
The Detector Responds To
Fast Motion Convex

31
Video from Eye Camera Motion Weighted Edge Map Multi-scale Histogram (Medial-Axis, Hough Transform for Circles) Local Maxima

32
Defining Characteristics
Geometric Isolated Distal Localized Convex Cultural/Design Far from natural grasp location Long distance relative to hand size

33
Other Task Relevant Features?

34
Detecting the Tip

35
Include Scale and Convexity

Similar presentations


>")
 Department of Electrical and Computer Systems Engineering Monash.>")










 Generally useful patterns (edges) Also (new) “Interesting” distinctive patterns ( No specific pattern:>")


 1 IEEE Robotics.>")


