Download presentation
Presentation is loading. Please wait.

1
Computer vision: geometric models Md. Atiqur Rahman Ahad Based on: Computer vision: models, learning and inference. ©2011 Simon J.D. Prince

2
To understand the structure of the environment from the captures images - Need to maintain accurate and realistic models of – – Lighting – Surface properties – Camera geometry – Camera and object motion 2

3
2.1 Models of surface reflectance Interaction of light with materials is key to imaging n to develop models for surfaces Light incident on a surface is – Absorbed, – Reflected, – Scattered, and/or – Refracted 3

4
BRDF For an opaque/non-transparent/solid surface, with no subsurface scattering, BRDF is a function to characterize Bidirectional Reflectance Distribution Function (BRDF) It is a 4D fun that defines how light is reflected in opaque surface. 4

5
Goal is to estimate and infer properties of the surface Need simple models, e.g., – Lambertian model – Phong model 5

6
2.1.1 Lambertian reflectance model Lambertian model for surface reflectance: simple. It describes surfaces whose reflectance is independent of the observer’s viewing direction. E.g., – Matte paint, – Unpolished wood, – Wool exhibit the Lamb. model to a reasonable accuracy. 6

7
See Eq. 2.1 Albedo – the fraction of incident electromagnetic radiation that is reflected by the surface 7

8
2.1.2 Phone model / non.Lamb. Many real-world materials have non- Lambertian reflectacne. E.g., mirror-like surfaces: they reflect incoming light in a specific direction about the local surface normal, at the point of incidence Specular / mirror-like components and Lambartian components – together! 8

9
See eq. 2.1.2 2 parts of Phong model – – Diffuse part: for Lambertian shading due to illuminant direction – Specular term: for Specular highlights 9

10
2.2 Camera Models Pinhole camera projection / model Epipolar geomtery – consider 2 images or central projections of a 3D scene. Multi-view localization problem correspondence problem Traingulation – to localize the objects in world coordinates. Need correspondence info across cameras & it is difficult to obtain Planar images and homography [rotation matrix, translation matrix] Camera calibration 10

11
Motivation 11Computer vision: models, learning and inference. ©2011 Simon J.D. Prince Sparse stereo reconstruction Compute the depth at a set of sparse matching points

12
Pinhole camera model 12Computer vision: models, learning and inference. ©2011 Simon J.D. Prince Real camera image is inverted Instead model impossible but more convenient virtual image

13
Pinhole camera terminology 13Computer vision: models, learning and inference. ©2011 Simon J.D. Prince World coordinates Image plane coordinates

14
Normalized Camera 14Computer vision: models, learning and inference. ©2011 Simon J.D. Prince By similar triangles:

15
Can model both the effect of the distance to the focal plane the density of the receptors with a single focal length parameter In practice, the receptors may not be square: So use different focal length parameter for x and y dims Focal length parameters 15Computer vision: models, learning and inference. ©2011 Simon J.D. Prince

16
Offset parameters 16Computer vision: models, learning and inference. ©2011 Simon J.D. Prince Current model assumes that pixel (0,0) is where the principal ray strikes the image plane (i.e., the center) Model offset to center
 is where the principal ray strikes the image plane (i.e., the center) Model offset to center.")
17
Finally, add skew parameter Accounts for image plane being not exactly perpendicular to the principal ray Skew parameter 17Computer vision: models, learning and inference. ©2011 Simon J.D. Prince

18
Position w=(u,v,w) T of point in the world is generally not expressed in the frame of reference of the camera. Transform using 3D transformation or Position and orientation of camera 18Computer vision: models, learning and inference. ©2011 Simon J.D. Prince Point in frame of reference of camera Point in frame of reference of world / World coordinates

19
Intrinsic [inherent/essential] parameters (stored as intrinsic matrix) Extrinsic [external/non-essential] parameters Complete pinhole camera model 19Computer vision: models, learning and inference. ©2011 Simon J.D. Prince focal length parameter different focal length parameter for x and y dims.
![Intrinsic [inherent/essential] parameters (stored as intrinsic matrix) Extrinsic [external/non-essential] parameters Complete pinhole camera model 19Computer vision: models, learning and inference.](http://images.slideplayer.com/39/10950438/slides/slide_19.jpg "©2011 Simon J.D. Prince focal length parameter different focal length parameter for x and y dims..")
20
For short: Add noise – uncertainty in localizing feature in image Complete pinhole camera model 20Computer vision: models, learning and inference. ©2011 Simon J.D. Prince

21
Radial distortion 21Computer vision: models, learning and inference. ©2011 Simon J.D. Prince

22
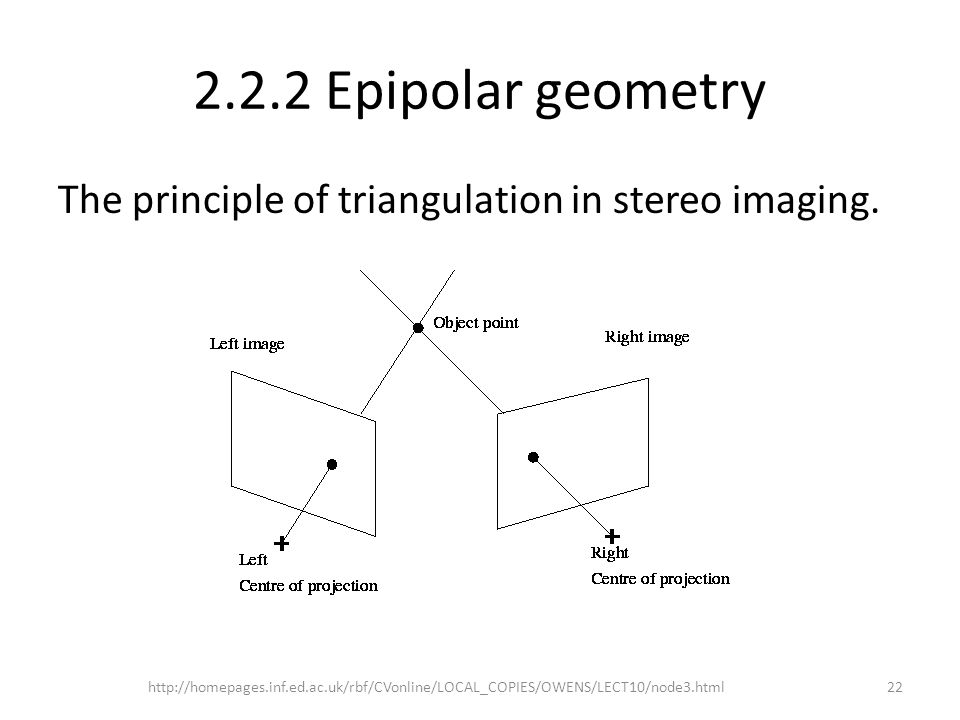
2.2.2 Epipolar geometry The principle of triangulation in stereo imaging. http://homepages.inf.ed.ac.uk/rbf/CVonline/LOCAL_COPIES/OWENS/LECT10/node3.html22
23
Epipolar constraint 23

24
The epipole is the point of intersection of the line joining the optical centres, that is the baseline, with the image plane. Thus the epipole is the image, in one camera, of the optical centre of the other camera. The epipolar plane is the plane defined by a 3D point M and the optical centres C and C'. The epipolar line is the straight line of intersection of the epipolar plane with the image plane. It is the image in one camera of a ray through the optical centre and image point in the other camera. All epipolar lines intersect at the epipole. 24

25
The epipolar line along which the corresponding point for X must lie. 25

26
Conclusion 26Computer vision: models, learning and inference. ©2011 Simon J.D. Prince Pinhole camera model is a non-linear function that takes points in 3D world and finds where they map to in image Parameterized by intrinsic and extrinsic matrices Difficult to estimate intrinsic/extrinsic/depth because non-linear Use homogeneous coordinates where we can get closed form solutions (initial sol’ns only)
.")
Similar presentations










Correspondence geometry: Given an image point x in the first view, how does this constrain the position of the corresponding point.>")




 CSC 59866CD Fall 2004 Zhigang Zhu, NAC 8/203A>")



