Download presentation
Presentation is loading. Please wait.

1
The Use of GPS Disciplined Oscillators as Primary Frequency Standards for Calibration Laboratories NCSLI – August 2008 Michael Lombardi National Institute of Standards and Technology Time and Frequency Division, Boulder, Colorado lombardi@nist.gov 303-497-3212

2
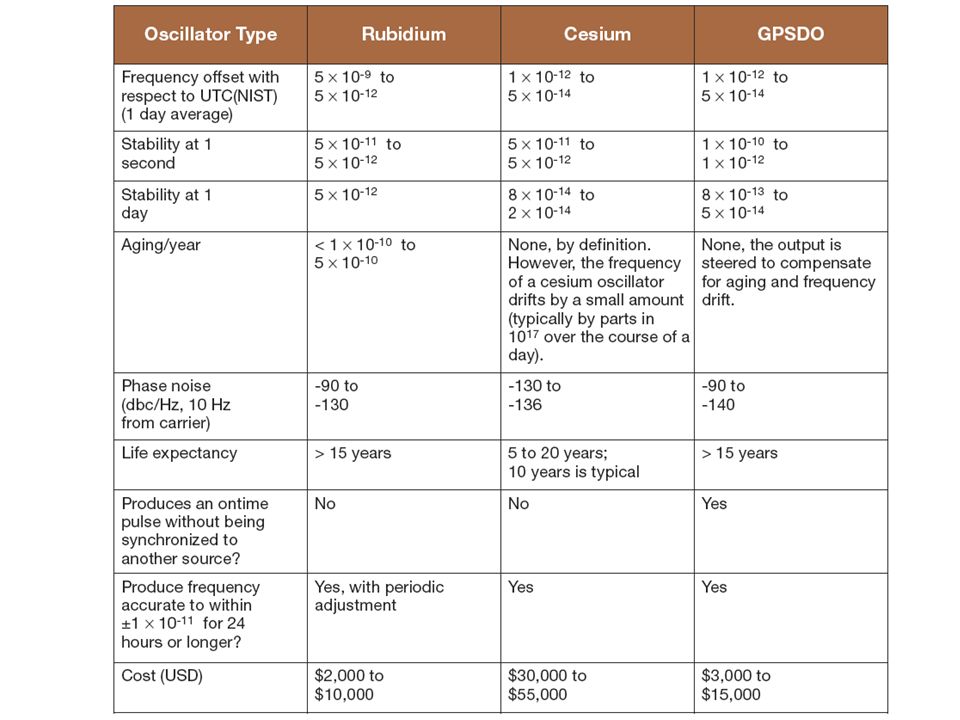
n n Cesium Oscillators u u Used to define the second, one of the seven base units of the SI u u A true intrinsic standard u u Costly, at least $30,000 for a new unit n n Rubidium Oscillators u u Low cost (often under $5,000) but need to be adjusted often to compensate for aging and frequency drift n n GPS Disciplined Oscillators u u A quartz or rubidium oscillator continuously steered to agree with signals from the GPS satellites u u Due to their excellent price-performance ratio and low maintenance, they are becoming more and more common in calibration labs u u Are they an acceptable choice as a primary frequency standard? Primary Frequency Standards Available to Cal Labs

3
n n GPS is a positioning and navigation system, but is also the main system used to distribute accurate time and frequency worldwide n n The constellation includes at least 24, and a maximum of 32 satellites (31 satellites are in orbit as of July 2008) u u The satellites are in semi- synchronous, circular orbits at an altitude of about 20,200 km u u The orbital period is 11 hours, 58 minutes u u At least four (typically seven or more) satellites can always be received at a given location, so the entire Earth is has continuous GPS coverage n n The satellites carry either cesium or rubidium oscillators What is GPS?
 u u The satellites are in semi- synchronous, circular orbits at an altitude of about 20,200 km u u The orbital period is 11 hours, 58 minutes u u At least four (typically seven or more) satellites can always be received at a given location, so the entire Earth is has continuous GPS coverage n n The satellites carry either cesium or rubidium oscillators What is GPS")
4
n nGPS currently broadcasts several code types on two L-band carrier frequencies: L 1 = 1575.42 MHz L 2 = 1227.60 MHz n nThe reference signal for nearly all GPSDOs used by cal labs is the Coarse Acquisition (C/A) code that is modulated on to the L1 carrier GPS Signal Structure
 code that is modulated on to the L1 carrier GPS Signal Structure")
5
n n Currently (July 2008) there are 31 GPS satellites in orbit u u All slots are filled except PRN 1 u u 7 run off cesium oscillators u u 24 run off rubidium oscillators u u Oldest satellite is PRN 32, launched in November 1990, this was a Block IIA satellite built by Rockwell u u Newest satellite is PRN 07, launched in March 2008, a Block IIR-M satellite built by Lockheed- Martin u u 13 satellites are Block IIA launched from 1990 to 1997 u u 18 satellites are Block IIR or IIR-M launched in 1997-2008 Block II/IIA Vehicles GPS Satellites Block IIR/IIR-M Built by Lockheed Martin Launched 1997 - 2008
 there are 31 GPS satellites in orbit u u All slots are filled except PRN 1 u u 7 run off cesium oscillators u u 24 run off rubidium oscillators u u Oldest satellite is PRN 32, launched in November 1990, this was a Block IIA satellite built by Rockwell u u Newest satellite is PRN 07, launched in March 2008, a Block IIR-M satellite built by Lockheed- Martin u u 13 satellites are Block IIA launched from 1990 to 1997 u u 18 satellites are Block IIR or IIR-M launched in Block II/IIA Vehicles GPS Satellites Block IIR/IIR-M Built by Lockheed Martin Launched")
6
Why can GPS be trusted as a time/frequency reference? n n GPS requires highly accurate timing, or the navigation system will fail u u Assume that the maximum acceptable uncertainty contribution from the GPS clocks is 1 m: Light travels 3 x 10 8 m/s, thus a 1 m error equals a 3.3 ns timing uncertainty The clocks must be stable enough to keep time to better than 3.3 ns for 12 hours, the approximate period between clock corrections This requires better than 1 x 10 -13 stability (3.3 x 10 -9 s / 43200 s = 0.8 x 10 -13 ) n n The atomic oscillators onboard the satellites are steered from U. S. Air Force ground stations to agree with the Coordinated Universal Time (UTC) time scale maintained by the U. S. Naval Observatory, known as UTC(USNO). u u The time difference between UTC(USNO) and UTC(NIST) rarely exceeds 20 nanoseconds u u The frequency difference between UTC(USNO) and UTC(NIST) is a few parts in 10 15 or less when measured over a one-month interval u u The GPS signals contain the best estimate of UTC being broadcast anywhere, and they are available free of change to anyone, worldwide
 n n The atomic oscillators onboard the satellites are steered from U. S. Air Force ground stations to agree with the Coordinated Universal Time (UTC) time scale maintained by the U. S. Naval Observatory, known as UTC(USNO). u u The time difference between UTC(USNO) and UTC(NIST) rarely exceeds 20 nanoseconds u u The frequency difference between UTC(USNO) and UTC(NIST) is a few parts in or less when measured over a one-month interval u u The GPS signals contain the best estimate of UTC being broadcast anywhere, and they are available free of change to anyone, worldwide.")
7
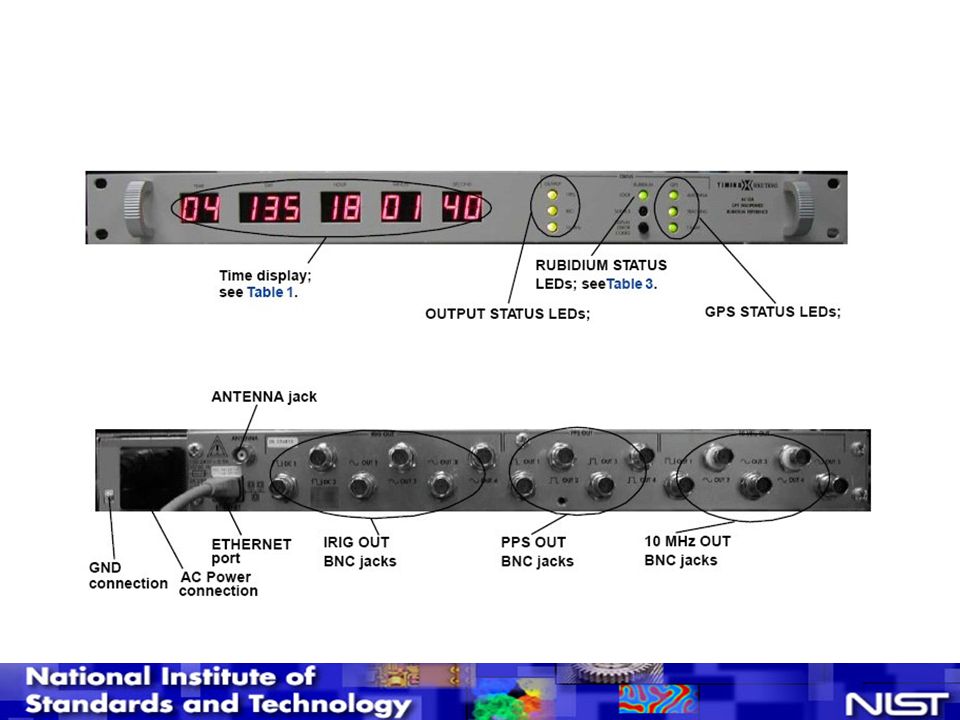
GPS Disciplined Oscillators (GPSDO) n GPSDOs receive signals from the GPS satellites, and use these signals to control or discipline the frequency of a local quartz or rubidium oscillator. A GPSDO outputs: u 1 pulse per second timing signals u Standard frequency signals such as 5 and 10 MHz. n The goal of the GPSDO designer is to transfer the inherent accuracy and stability of the satellite signals to the signals generated by the local quartz or rubidium oscillator. The short-term stability is provided by the local oscillator, the long term accuracy and stability is provided by the GPS signal

9
GPS Antennas n GPSDOs require a small antenna that is mounted on the roof. A new GPSDO normally begins surveying its antenna position as soon as it is turned on. The survey is a one-time process that typically lasts for several hours. When the survey is finished, the GPSDO is ready to use as a frequency and time standard. n Characteristics of GPSDO antennas: u typically high gain units (> 35 dB typical) that can drive the long antenna cables sometimes needed between the roof and the cal lab u active antennas, with internal amplifiers powered by 5 V dc from the antenna cable u omnidirectional, they need a clear sky view on all sides for best results
 that can drive the long antenna cables sometimes needed between the roof and the cal lab u active antennas, with internal amplifiers powered by 5 V dc from the antenna cable u omnidirectional, they need a clear sky view on all sides for best results.")
10
How a GPSDO Works n GPSDO manufacturers seldom disclose exactly how their products work (the method is usually proprietary). n However, most models control the local oscillator with one or more servo loops. One type of servo loop is a phase locked loop (PLL). u A PLL compares the phase of a reference input signal to the phase of a voltage controlled oscillator (VCO). u The phase detector outputs the phase difference between the two input signals to a loop filter, which in turn sends a control voltage to the VCO. u The control voltage changes the frequency of the VCO in a direction that reduces the phase difference between the VCO and the reference input signal. The PLL is locked when the phase of the VCO has a constant offset relative to the phase of the reference input signal.
. u A PLL compares the phase of a reference input signal to the phase of a voltage controlled oscillator (VCO). u The phase detector outputs the phase difference between the two input signals to a loop filter, which in turn sends a control voltage to the VCO. u The control voltage changes the frequency of the VCO in a direction that reduces the phase difference between the VCO and the reference input signal. The PLL is locked when the phase of the VCO has a constant offset relative to the phase of the reference input signal..")
11
GPSDO (steered local oscillator, no synthesizer) n A phase detector measures the difference between the 1 pps signal from GPS and the signal from the local VCO. n A microcontroller reads the output of the phase detector and monitors the phase difference. When the phase difference changes, the software changes the control voltage sent to the VCO, so that the phase difference is held within a given range. Some GPSDOs employ a PID controller, like you might find in a temperature controller. n The goal is to “smooth” the second-to-second fluctuations of the GPS signals, so that the VCO has reasonably good short-term frequency stability. However, the GPS signals must control the VCO frequency in the longer term.

12
GPSDO (unsteered local oscillator, synthesizer) n The local oscillator is used as the time base for a frequency synthesizer n The phase of the synthesizer is compared to GPS. A correction is sent to the synthesizer to compensate for the frequency offset and eliminate the phase difference, but no corrections are applied to the local oscillator. n Modern direct digital synthesizers (DDS) have excellent resolution and allow very small frequency corrections to be made (1 μHz resolution at 10 MHz allows frequency corrections of 1 × 10 -13 ). n Allowing the local oscillator to free run often results in better performance than the VCO method, where unexpected shifts in the control voltage can produce unwanted adjustments in the output frequency.
 have excellent resolution and allow very small frequency corrections to be made (1 μHz resolution at 10 MHz allows frequency corrections of 1 × ). n Allowing the local oscillator to free run often results in better performance than the VCO method, where unexpected shifts in the control voltage can produce unwanted adjustments in the output frequency..")
13
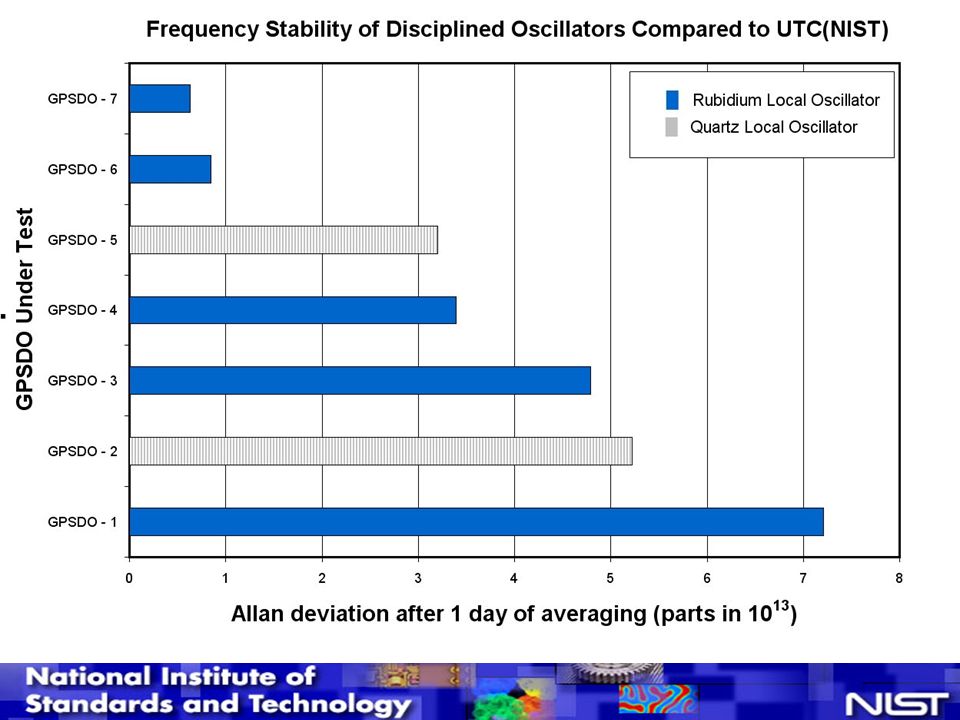
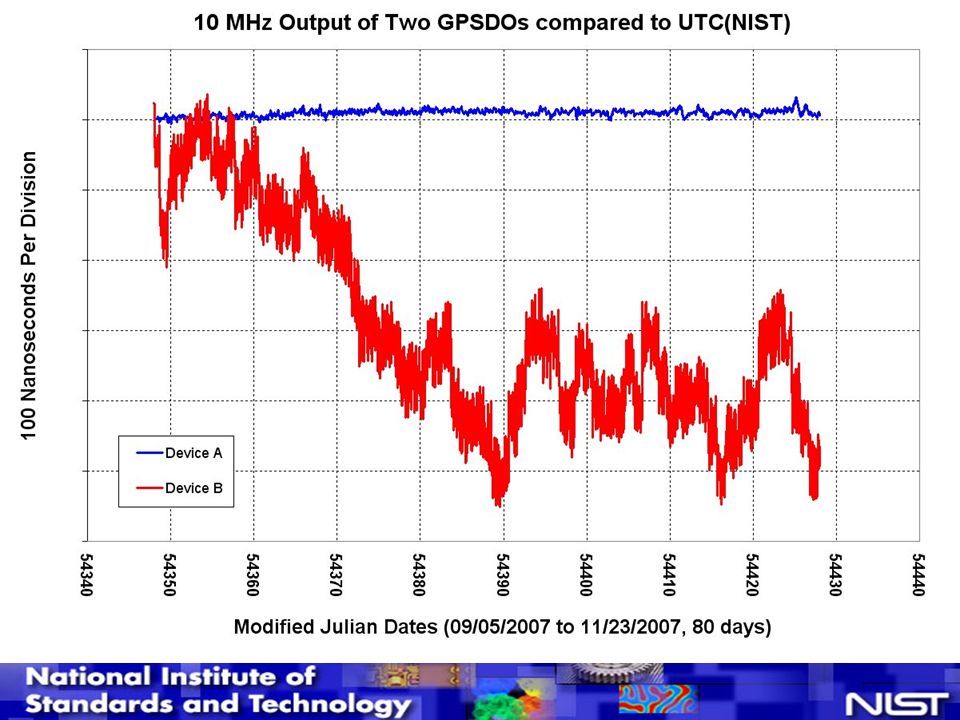
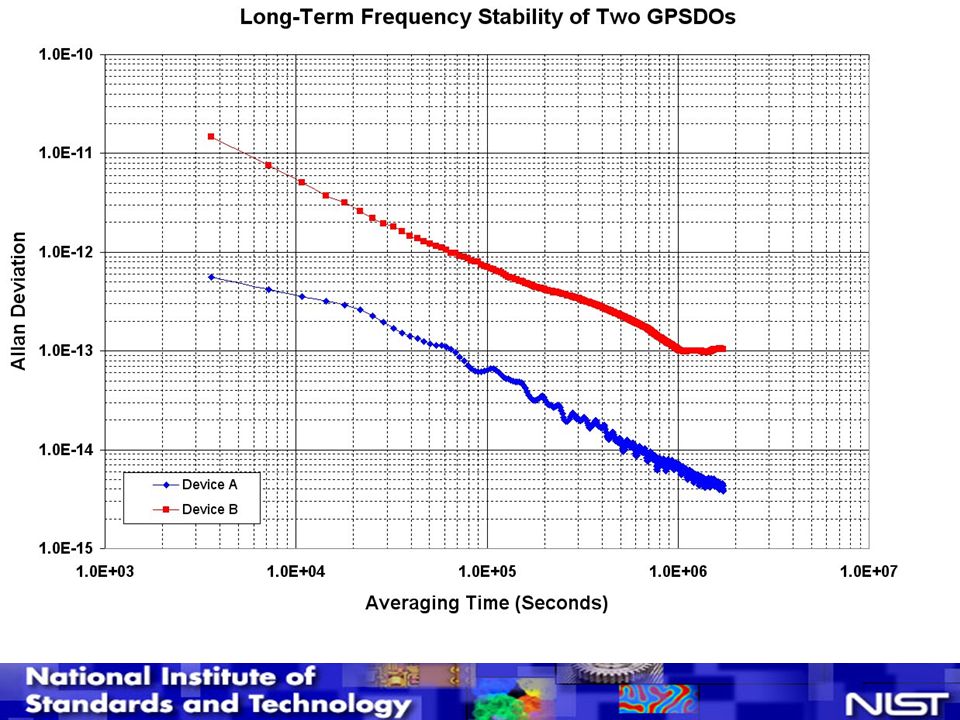
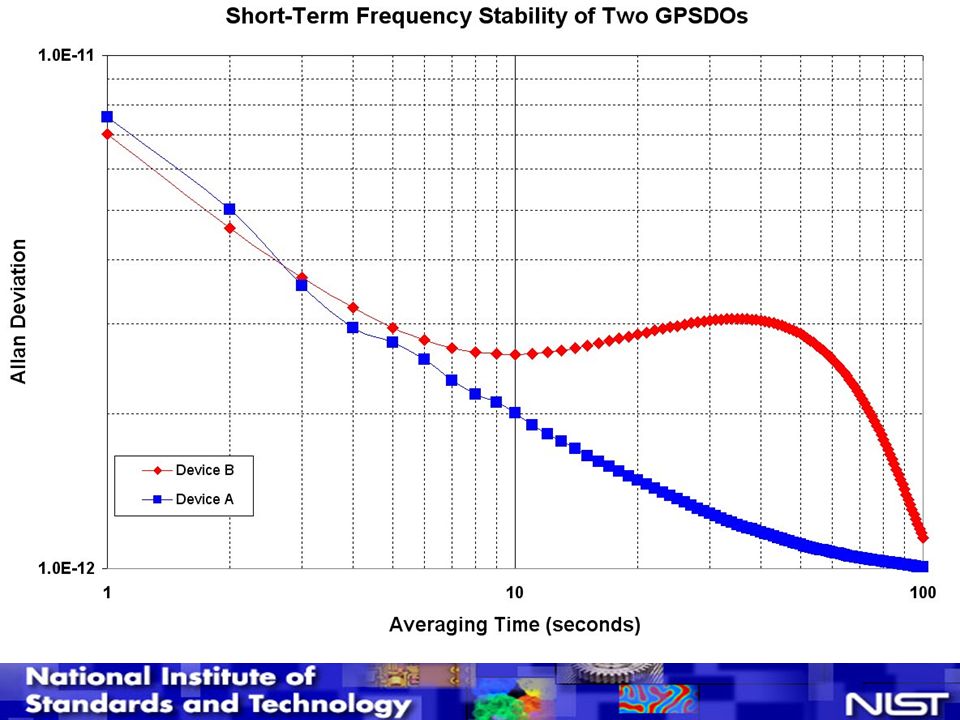
GPSDO Performance n Different models of GPSDOs produce different results, even when operated in identical environments. n Even so, when averaging for several days or more, any GPSDO that is locked to the satellite signals should be inherently accurate (parts in 10 13 or better) and inherently stable. This is because GPSDOs that simply “follow” the satellites will closely agree with UTC. n To cal labs, the most important specification of a GPSDO is probably frequency accuracy over a one day time period, because most frequency calibrations last for one day or less. u The frequency accuracy can be no better than the stability u A reasonably good metric to use when evaluating a GPSDO is its stability after one day of averaging, as estimated with the Allan deviation (ADEV). n Let’s look at the frequency stability of seven different GPSDOs calibrated at NIST, and then look more closely at the data from the best and worst performers in this group.
 and inherently stable. This is because GPSDOs that simply follow the satellites will closely agree with UTC. n To cal labs, the most important specification of a GPSDO is probably frequency accuracy over a one day time period, because most frequency calibrations last for one day or less. u The frequency accuracy can be no better than the stability u A reasonably good metric to use when evaluating a GPSDO is its stability after one day of averaging, as estimated with the Allan deviation (ADEV). n Let’s look at the frequency stability of seven different GPSDOs calibrated at NIST, and then look more closely at the data from the best and worst performers in this group..")
18
GPSDO Holdover Capability n n The most likely cause of GPS failure is RF interference and jamming (either intentional or unintentional) u u GPS signals are susceptible to interference due to their low power levels. A tiny interfering signal can cause a GPSDO to lose lock. u u The minimum received GPS signal strength is –160 dBW on Earth for the L1 carrier, equivalent to 10 -16 W. n n To simulate a GPS outage, we removed the antennas from four GPSDOs that had been locked for multiple weeks. This test showed that holdover capability varies significantly from model to model. u u In theory, a GPSDO with a rubidium local oscillator should have much better holdover capability than a quartz device. However, device D outperformed device C in the test.

19
This GPSDO quickly became a free running rubidium oscillator (1 10 -9 ) when GPS was lost, with no apparent holdover capability. A TCXO without holdover capability would likely be 100 to 1000 times less accurate.

21
GPSDO vs. Cesium, Pros & Cons n PROS of using a GPSDO as a primary standard u They cost at least 50% less, and often 90% less than a cesium oscillator. u They cost less to maintain, because there is no cesium beam tube to replace. u They can recover time by themselves (time-of-day and an on-time pulse synchronized to UTC). u A GPSDO never requires adjustment, since its frequency is controlled by satellite signals. n CONS of using a GPSDO as a primary standard u The can’t be adjusted. u They generally have poorer short term stability and higher phase noise than cesium standards. u They require an outdoor antenna, so the lab must have access to the roof. A cesium standard can be operated anywhere where electric power is available. u Cesium standards are autonomous and independent sources of frequency, which means they can operate without input from another source. A GPSDO only works properly if signals from the GPS satellites are available.
. u A GPSDO never requires adjustment, since its frequency is controlled by satellite signals. n CONS of using a GPSDO as a primary standard u The can’t be adjusted. u They generally have poorer short term stability and higher phase noise than cesium standards. u They require an outdoor antenna, so the lab must have access to the roof. A cesium standard can be operated anywhere where electric power is available. u Cesium standards are autonomous and independent sources of frequency, which means they can operate without input from another source. A GPSDO only works properly if signals from the GPS satellites are available..")
22
GPSDO Traceability n It was once thought in some quarters that metrological traceability to the SI could not be established with a GPSDO. However, a GPSDO can be used to establish traceability in full compliance with the VIM definition, a point confirmed by numerous lab assessments. n The key issue in establishing traceability is finding a way to assign an uncertainty to the GPSDO. There are at least three ways to do this, as summarized on the following slides.

23
nMethod 1 – Send the GPSDO out periodically for calibration This is the traditional model for obtaining an uncertainty value. Several NMIs (including NIST) will calibrate a GPSDO against the national standard. However, there are drawbacks to this method: Traceability is only established only at a given point in time, and would eventually have to be reestablished by another calibration. Cal labs that rely solely on this approach will have to periodically schedule and pay for repeat calibrations. This negates one of the chief advantages of owning a “self-calibrating” standard. Determining GPSDO Uncertainty, Method 1
 will calibrate a GPSDO against the national standard. However, there are drawbacks to this method: Traceability is only established only at a given point in time, and would eventually have to be reestablished by another calibration. Cal labs that rely solely on this approach will have to periodically schedule and pay for repeat calibrations. This negates one of the chief advantages of owning a self-calibrating standard. Determining GPSDO Uncertainty, Method 1.")
24
n Method 2 - Assign an uncertainty, and then continuously verify that both the GPSDO and the GPS satellites are working properly u A frequency uncertainty can be assigned from a previous calibration (Method 1) or from the manufacturer’s specification sheet u To ensure that the GPSDO is meeting its specification, the cal lab must develop a procedure that verifies that the GPSDO is tracking satellites and working properly, and that the GPS satellites are working properly NIST compares the national frequency standard to the GPS signals and publishes the results on the Internet (updated daily) at: tf.nist.gov/service/gpstrace.htm Determining GPSDO Uncertainty, Method 2
 or from the manufacturer’s specification sheet u To ensure that the GPSDO is meeting its specification, the cal lab must develop a procedure that verifies that the GPSDO is tracking satellites and working properly, and that the GPS satellites are working properly NIST compares the national frequency standard to the GPS signals and publishes the results on the Internet (updated daily) at: tf.nist.gov/service/gpstrace.htm Determining GPSDO Uncertainty, Method 2")
25
nMethod 3 – Have the GPSDO continuously measured and monitored by a remote calibration service uRemote calibration services offered by NMIs make it possible for cal labs to continuously compare a GPSDO to the national frequency standard so that its uncertainty is known at all times, providing continuous validation of the frequency traceability chain. uNIST offers two remote calibration services that are suitable for continuous measurement of a GPSDO. The Frequency Measurement and Analysis Service (FMAS) The Time Measurement and Analysis Service (TMAS) uOther NMIs offer similar services. Determining GPSDO Uncertainty, Method 3
 The Time Measurement and Analysis Service (TMAS) uOther NMIs offer similar services. Determining GPSDO Uncertainty, Method 3.")
26
Summary and Conclusion n GPSDOs provide excellent performance at a relatively low cost, and have gained widespread acceptance as primary frequency standards in calibration and testing laboratories. n Performance (accuracy and stability) is near 1 × 10 -13 after one day of averaging for the higher quality models. Performance of all models should exceed 1 × 10 -12. n Even though performance is excellent, laboratories must establish a procedure that verifies that the GPSDO is working properly and that the traceability chain is always intact. This paper is in the Conference Proceedings, and a slightly improved version will be published in the September 2008 issue of Measure. Thank you for your attention!
 is near 1 × after one day of averaging for the higher quality models. Performance of all models should exceed 1 × n Even though performance is excellent, laboratories must establish a procedure that verifies that the GPSDO is working properly and that the traceability chain is always intact. This paper is in the Conference Proceedings, and a slightly improved version will be published in the September 2008 issue of Measure. Thank you for your attention!.")
Similar presentations







, pressure.>")
There must be some characteristic of the receiver’s environment that can be.>")









>")
