Download presentation
Presentation is loading. Please wait.

1
Randomized KinoDynamic Planning Steven LaValle James Kuffner

2
Randomized KinoDynamic Planning To determine the sequence of control inputs to drive a robot from an initial state to an end state while obeying physically based dynamic models and avoiding obstacles in the robot’s environment Approach: tailored form of randomization (RRT’s) specially suited to high dimensional state spaces
 specially suited to high dimensional state spaces")
3
Introduction and Related Research Randomized Potential Field

4
Introduction and Related Research Randomized Potential Field – A heuristic potential function is defined on the configuration space to steer robot towards goal through gradient descent

5
Introduction and Related Research Randomized Potential Field – A heuristic function is defined on the configuration space to steer robot towards goal through gradient descent – Random walks are used to escape local minimum traps.

6
Introduction and Related Research Randomized Potential Field – PRO: Drives exploration with gradient descent – PRO: Works well for holonomic planning – CON: Depends heavily on choice of good potential heuristic function – CON: Hard to do to accommodate obstacles and differential constraints – CON: Local Minima

7
Introduction and Related Research Probabilistic Roadmap – A graph is constructed on configuration space by generating random configurations and attempting to connect pairs of nearby configurations with a local planner.

8
Introduction and Related Research Probabilistic Roadmap – PRO: Uniform exploration – PRO: Local planning step is efficient for holonomic and steerable nonholonomic systems (simple) – CON: For complex nonholonomic and dynamic systems, local planning is HARD, like designing non-linear controller – CON: 1000’s of local planning steps typically – CON: designed for many queries (large pre-comp)
 – CON: For complex nonholonomic and dynamic systems, local planning is HARD, like designing non-linear controller – CON: 1000’s of local planning steps typically – CON: designed for many queries (large pre-comp)")
9
Problem Formulation Differential Constraints in State Space

10
Problem Formulation Handling Obstacles in State Space

11
Problem Formulation Solution Trajectory Unique Challenges: State Space has twice the dimension of Configuration; worsens the curse Momentum considerations cause drift, overshooting, oscillations, which potential fields and probabilistic roadmaps can’t handle

12
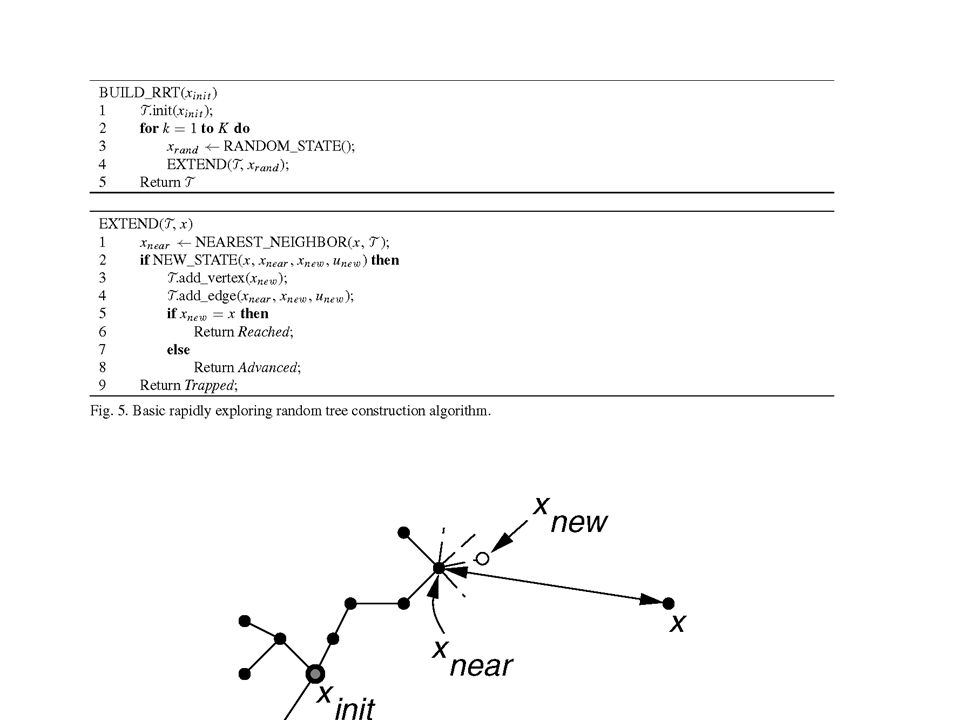
RRT based planner Rapidly exploring Random Trees- State Space Strategy… – Initialize tree with vertex – Repeatedly, select state at random in state space Select its nearest neighbor in the tree Choose a control and ensuing output that pushes neighbor state towards random state Create new vertex and add to tree

14
RRT based planner

15
Rapidly exploring Random Trees Outcome…

16
RRT based planner Rapidly exploring Random Trees – PRO: works for high degrees of freedom – PRO: no steering required – PRO: biased toward unexplored space – PRO: probabilistic completeness – CON: no well defined metric

17
RRT based planner Bidirectionnal planning algorithm Strategy: – Grow two RRT’s at initial and goal states – At each growth step, check for intersection – Either halt once path exists, or continue to accumulate best paths

18
RRT based planner Bidirectionnal planning algorithm Formally…

19
Spacecraft and Hovercraft tests Model – State

20
Spacecraft and Hovercraft tests Model – Control

21
Spacecraft and Hovercraft tests Model – Metric (Euclidean) – Weight vector is normalized – Dot product represents cosine of angle
 – Weight vector is normalized – Dot product represents cosine of angle")
22
Spacecraft and Hovercraft tests Model – Controls consists of a fixed set U in each example – Each set includes a ‘no control’ control – Each control is applied over a fixed timestep eg. dt = 0.01 sec – Control timestep is independent of RRT timestep Video

23
Spacecraft and Hovercraft tests Case 1: Planar Translating Body in X-Z plane 4 DOF: x,z,x’,z’ 4 Controls:

24
Spacecraft and Hovercraft tests Case 2: Planar Body with Rotation – 6 DoF: x,y,θ,x’,y’, θ’ – 3 controls: Translate forward Rotate clockwise Rotate counterCW

25
Spacecraft and Hovercraft tests Case 2: Planar Body with Rotation – ~ 5 minutes – 13,600 nodes

26
Spacecraft and Hovercraft tests Case 3: Translating 3-D body – 6 DoF: x,y,z,x’,y’,z’ – 6 controls: Opposing forces In each of the 3 Principal directions

27
Spacecraft and Hovercraft tests Case 3: Translating 3-D body – ~1 min – 16,300 nodes

28
Spacecraft and Hovercraft tests Case 3: Translating 3-D body – ~1 min – 16,300 nodes

29
Spacecraft and Hovercraft tests Case 4: 3-D body with rotation – Cylindrical satellite object – 12 DoF: x,y,z,Rx,Ry,Rz and derivatives – 5 controls: translate along Cylindirical axis, rotates arbitrarily Simulates satellite docking

30
Spacecraft and Hovercraft tests Case 4: 3-D body with rotation – ~6 minute – 23,800 nodes

31
Spacecraft and Hovercraft tests Case 4: 3-D body with rotation – ~6 minute – 23,800 nodes

32
Spacecraft and Hovercraft tests Case 4: 3-D body with rotation – 12 DoF – 5 controls – Forward, up-down – Clockwise roll

33
Spacecraft and Hovercraft tests Case 4: 3-D body with rotation – ~11 minute – ??? nodes

34
Broader Applications Broad applications in Humanoid Robotics – Generalized to many high DoF problems subject to various constraints Integrated Grasp Planning (Vahrenkamp, Do et al) [6] Full Body Motion (S Kagami, J Kuffner et al) [7]
![Broader Applications Broad applications in Humanoid Robotics – Generalized to many high DoF problems subject to various constraints Integrated Grasp Planning (Vahrenkamp, Do et al) [6] Full Body Motion (S Kagami, J Kuffner et al) [7]](http://images.slideplayer.com/35/10498626/slides/slide_34.jpg "Broader Applications Broad applications in Humanoid Robotics – Generalized to many high DoF problems subject to various constraints Integrated Grasp Planning (Vahrenkamp, Do et al) [6] Full Body Motion (S Kagami, J Kuffner et al) [7]")
Similar presentations

 Originally designed to handle.>")

















