Download presentation
Presentation is loading. Please wait.

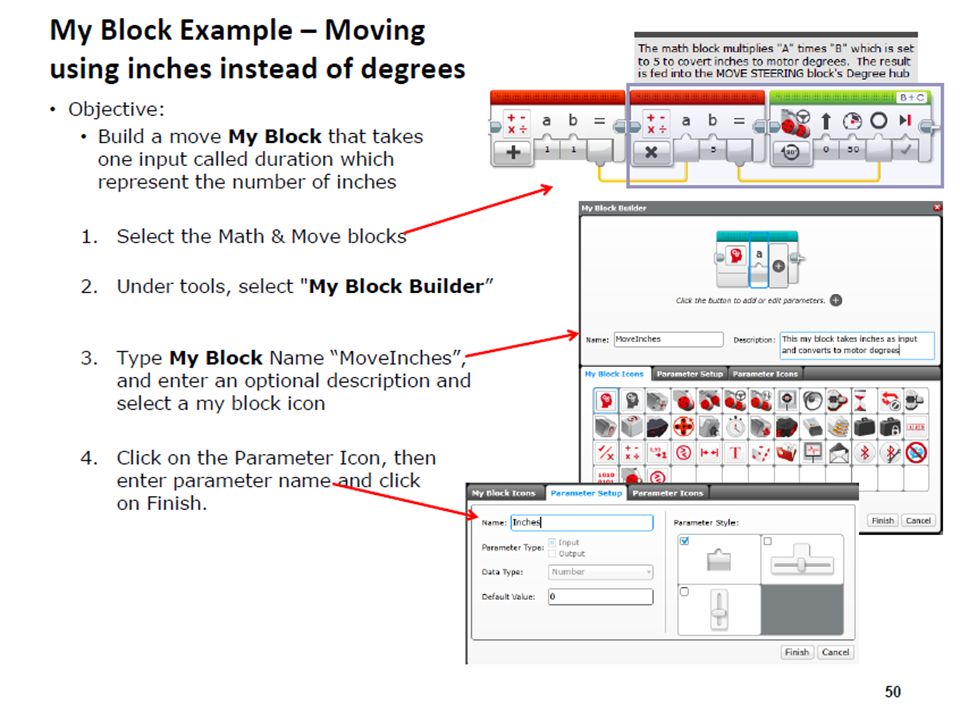
50
Greg’s Tips Logic wires = Green Numeric wires = Yellow Text wires = Orange Use lots of comments in program Name loops for a cleaner program Motors default to B & C Use.2 sec. “waits” when program changes

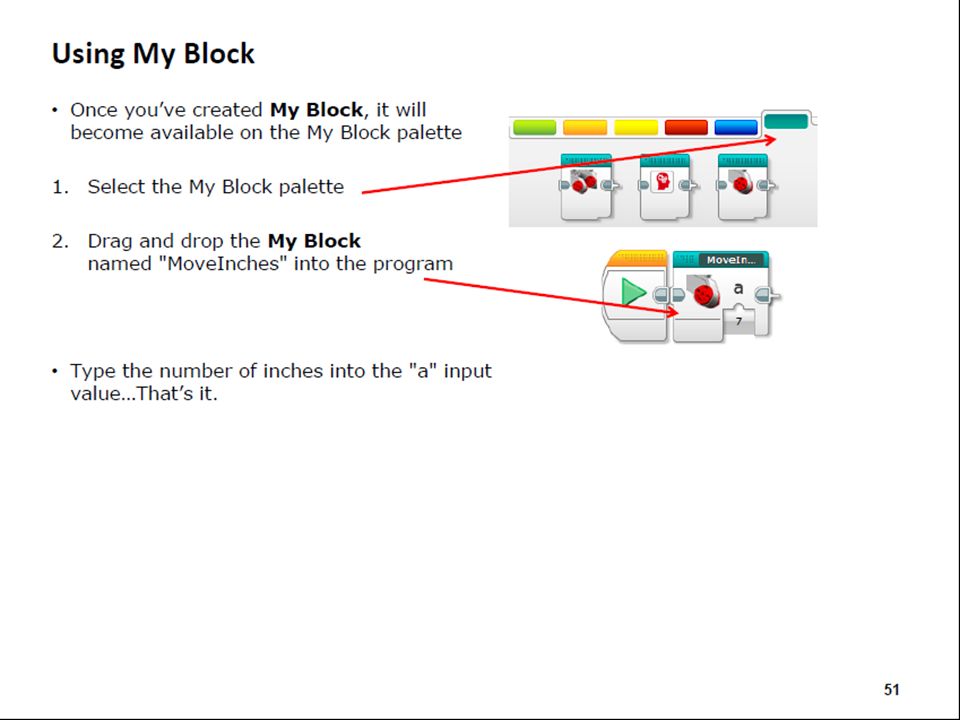
51
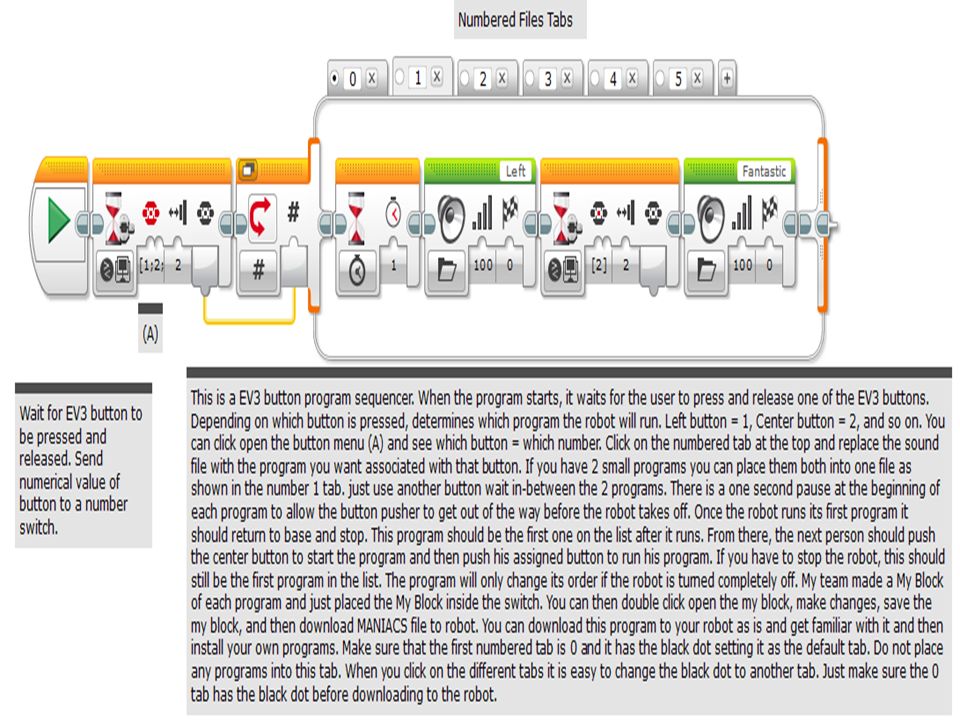
Tips Cont. Motors feedback in Degrees ONLY Reset motors before using rotation sensor Speed vs Accuracy Use program HELP! http://www.firstlegoleague.org/challenge/tea mresources http://www.firstlegoleague.org/challenge/tea mresources Create a program sequencer. Debugging

52
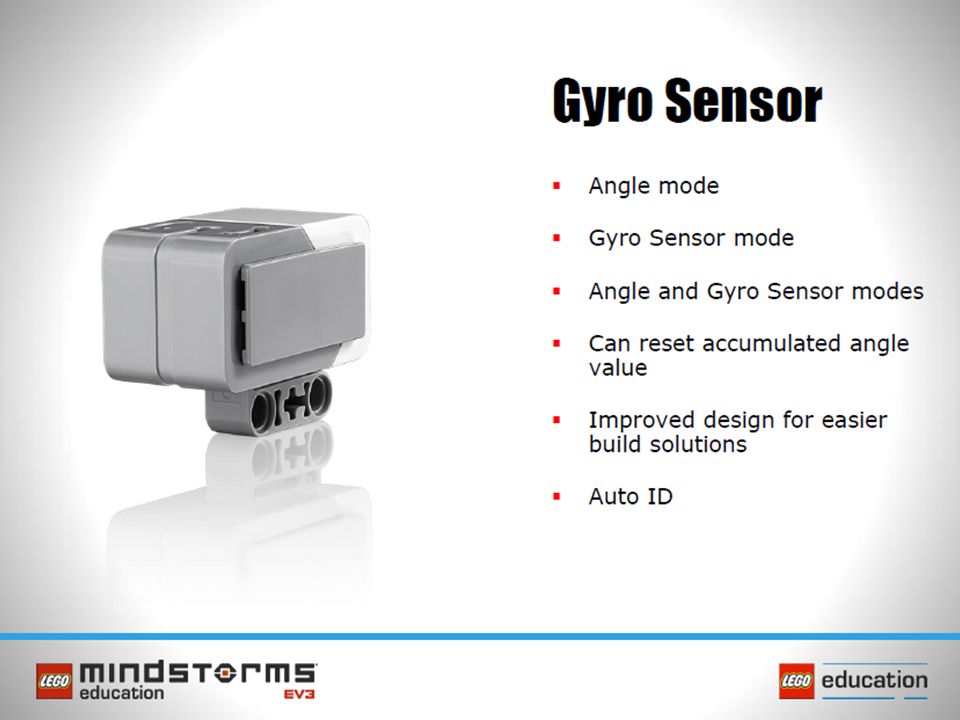
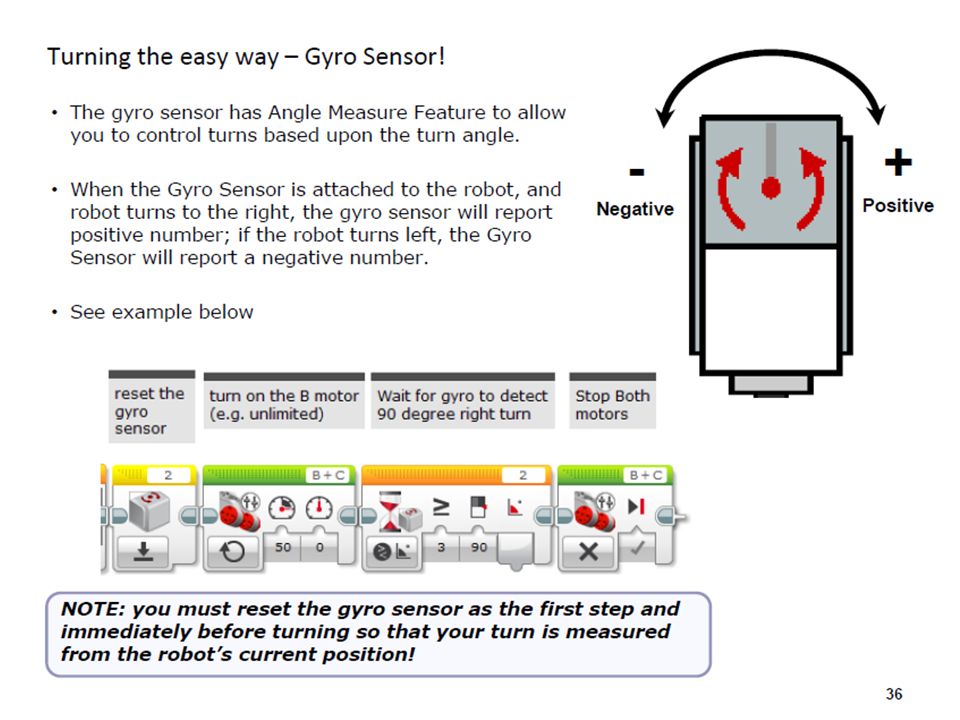
Gyro Sensor Calibration

54
RAW Sensor

55
Common Issues Wrong Port Not using sensors with WAIT or LOOP block

56
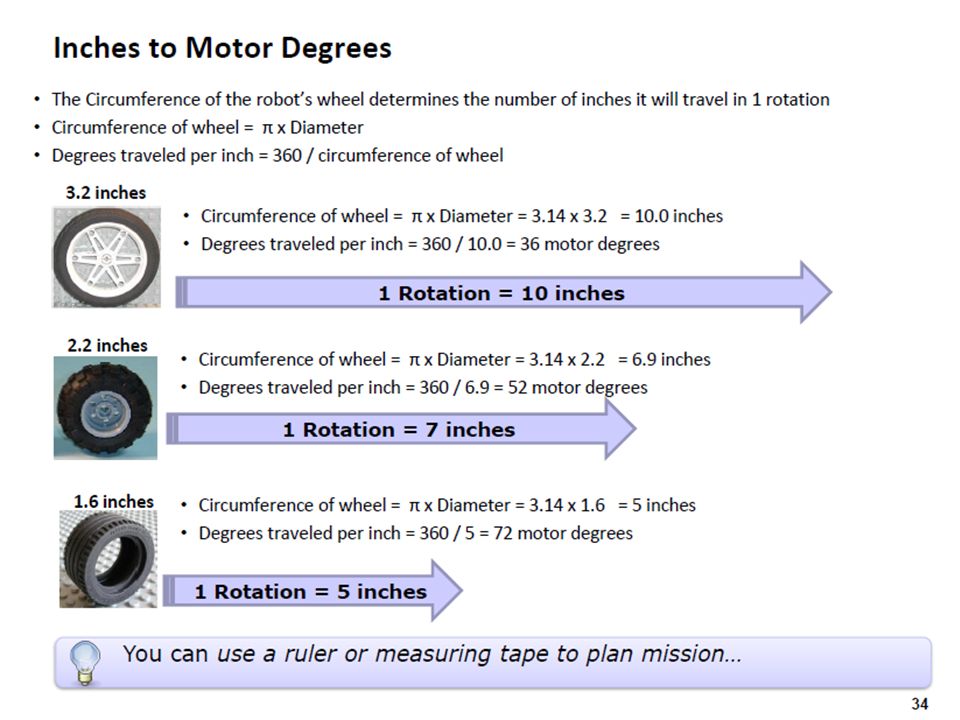
FORMULAS Calculate Distance D = Diameter of Tire (2.2”) C = D * Pi (3.14) C = Circumference of Tire = (6.90”) Motor Rotations to move 12” 12” / C = 12 / 6.90 = 1.73 Rotations
 C = D * Pi (3.14) C = Circumference of Tire = (6.90 ) Motor Rotations to move / C = 12 / 6.90 = 1.73 Rotations")
57
FORMULAS CONT. D = Diameter of turn B = Distance between drive wheels (center) VR = Right wheel power VL = Left wheel power D = B * (VR+VL) / (VR-VL) If D = negative number, robot will turn right
 VR = Right wheel power VL = Left wheel power D = B * (VR+VL) / (VR-VL) If D = negative number, robot will turn right.")
58
FORMULAS CONT. Using Standard 43.2 x 22 tires. Motor Rotations Divide by 27 for CM (wheel) Motor Rotations Divide by 36 for CM (tracks) 360 degrees / 27 = 13.3 CM 13.3 CM / 2.54 = 5.23”
 Motor Rotations Divide by 36 for CM (tracks) 360 degrees / 27 = 13.3 CM 13.3 CM / 2.54 =")
59
CONTACT GREG GREER greggreer@q.com 208-731-7965

Similar presentations



























 Formatting by Shannon Sieber.>")














