Download presentation
Presentation is loading. Please wait.

1
Ontologies for Reasoning, Action and Interaction in Space
John Bateman University of Bremen SOCop Meeting: 12th November 2009

2
Overview of talk Context of the work Representations of Space
within our Collaborative Research Center: “Spatial Cognition”... ... and my work within that Representations of Space Results and Conclusions Proposals for Ontology Best Practice Next targets and challenges

3
Spatial Cognition: SFB/TR8
Areas: spatial reasoning, representation, action and communication Organisation: Collaborative Research Center Bremen / Freiburg funded by: Deutsche Forschungsgemeinschaft (DFG: German Research Council ) 3 Phases 1st phase: : 12 projects 2nd phase: : 18 projects 3rd phase: being proposed
 3 Phases. 1st phase: : 12 projects. 2nd phase: : 18 projects. 3rd phase: being proposed.")
4
Spatial Assistance Mobility support Spatially-embedded tasks
Descriptions of spatial situations verbally visually Exploration Navigation Dialogic interaction

5
Bremen Autonomous Wheelchair: Rolland
Qualitative Information “In front to the right is the seminar room” Quantitative information : Rolland Symbolic information [door_1 recognized]

6
Test-Bed: BAALL Bremen Ambient Assisted Living Lab
Environment heating, lighting safety soft / hard / middleware interaction Appliances refrigerator cooker cupboards, drawers washing machine, microwave TV, PC, … mobile phone doors Autonomous assistance devices wheelchairs walkers Health monitoring Architecture

7
Sensor data: ‘free-space’ maps

8
Voronoi calculation on a scanned floor plan
“where are you?” Voronoi map From SFB/TR8 project: A1-[RoboMap]

9
Unnatural / unhelpful descriptions
25.4 m NW of you GPS: “34° 15´ N / 3° 27´ E” “3.45m away from edge 98 (with 80% certainty)”
")
10
Natural route descriptions
Leave the room and turn right into the corridor. Go to the window and then turn left. Follow the corridor and I’m in the last room on the left. Many problems of semantic interpretation involved here...

11
Context-specific way-finding assistance
schematization Kai-Florian Richter, Thomas Barkowksy et al. "At the next junction go straight on, and then, turn right before a map. Keep following the river until a Telekom sign, and then, turn left after the Telekom sign. Go towards the Universum until a bus stop, and then, turn right after the bus stop."

12
Sources of relevant knowledge
Location-based services Geographic Information Systems Commonsense objects and activities Spatial awareness and understanding Natural language capabilities Robot perception

13
Basic problem Getting these diverse areas of expertise to talk to each other is a serious issue different communities different interests different representations The kinds of knowledge maintained by such systems are very different

14
Consequences Component specifications are developed again and again (and again and again) Each community of practice defines them slightly differently (or not, it is difficult to tell) Each standardisation group has little time to look at parallel activities and must reflect the demands of its own community before considering others Lack of foundation leads to a proliferation of ‘standardisation’ efforts
 Each standardisation group has little time to look at parallel activities and must reflect the demands of its own community before considering others. Lack of foundation leads to a proliferation of ‘standardisation’ efforts.")
15
15 Research Foci: John Bateman Computational Linguistics
Multilingual natural language generation Interfaces between language technology and world/domain knowledge Development of linguistically-motivated ontologies Formal Ontology General design principles for ontology Relations between differently motivated ontologies Spatial representation and language Dialogic natural language interaction Spatial language 1988 1992 2001 15

16
Solution we are pursuing
High degree of interoperability between diverse knowledge-rich systems is to be achieved by ontological engineering, taking in: knowledge of the human world (commonsense) knowledge of the robot world (programmed, emergent) geo-knowledge (GML, other standards) spatial knowledge (spatial calculi, spatial ontologies) knowledge of language (linguistics)
 knowledge of the robot world (programmed, emergent) geo-knowledge (GML, other standards) spatial knowledge (spatial calculi, spatial ontologies) knowledge of language (linguistics)")
17
HIGHLY STRUCTURED AND MOTIVATED SEMANTICS
Goals HIGHLY STRUCTURED AND MOTIVATED SEMANTICS Achieving interaction between system modules using ONTOLOGIES ONTOLOGY 1 ONTOLOGY 2 inter-ontology mediation ONTOLOGIES DOMAINS

18
Goals Achieving interaction between system modules using ONTOLOGIES
SPATIAL REPRESENTATIONS LINGUISTIC REPRESENTATIONS inter-ontology mediation ONTOLOGIES DOMAINS

19
Goals Achieving interaction between system modules using ONTOLOGIES
SPATIAL REPRESENTATIONS GENERAL ONTOLOGY inter-ontology mediation ONTOLOGIES DOMAINS

20
Goals Achieving interaction between system modules using ONTOLOGIES
ROUTE GRAPH R3: GVG ROUTE GRAPH A1: PATH inter-ontology mediation ONTOLOGIES DOMAINS

21
Ontologies... ... but where to start?

22
Fundamental issue The ontologies present are diverse:
different methodologies different motivations different domains of application different worlds different purposes different communities

23
Representations of Space
Ontology and Space Qualitative Spatial Representation and Reasoning Language GIS

24
Representations of Space
ontology Foundational Ontologies Qualitative Spatial Reasoning + Representation Linguistics physical mathematical Geometry R3

25
Ontology + QSR: Varying primitives
Bateman/Farrar (2006) Spatial Ontology Baseline 25 25
 Spatial Ontology Baseline")
26
Spatial Representations
Ontology Qualitative Spatial Reasoning and Representation Language 26 26

27
Ontologies: SUMO 27 27

28
Ontologies: SUMO 28 Shape: internal attribute (inheres in some entity)
Position: relational attribute 28 28

29
Ontologies: SUMO Spatial Relations 29 29

30
Ontologies: Cyc 30 30

31
Ontologies: Cyc 31 31

32
Ontologies: Cyc 32 32

33
Ontologies: Cyc: Paths
33 33

34
Navigation: route graphs
MZH 3rd Floor kitchen MZH 3100 MZH 3110 Route Graph 34 34

35
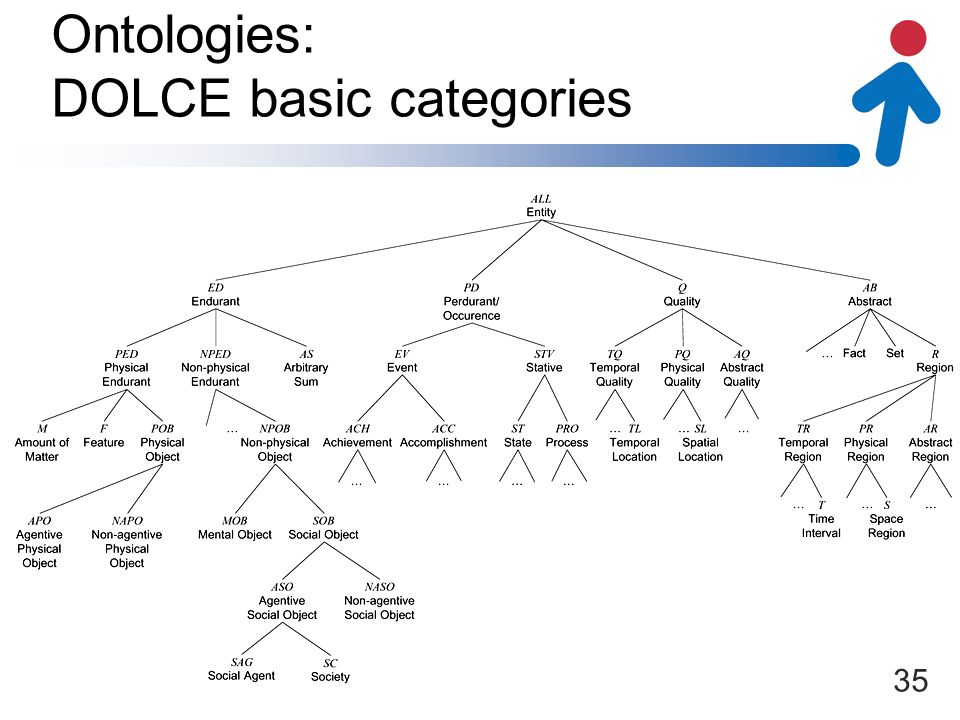
Ontologies: DOLCE basic categories
35 35
36
DOLCE basic categories
Rooms, offices, buildings, tables, chairs, ... 36 36

37
DOLCE basic categories
Events, happenings, movements, changes 37 37

38
DOLCE basic categories
Agents, states of belief, plans, goals 38 38

39
One-sided generic constant dependence
DOLCE inter-entity relationships Feature (F) Non-Agentive Physical Object (NAPO) Amount of Matter (M) Physical Endurant (PED) Physical Quality (PQ) OGD GK MSDS Mutual specific spatial dependence One-sided generic constant dependence Generic constant constitution Quality (Q) heavy pebbly wood rocks, sand, water table coast corner of a table curve of a bay 39 39
 Non-Agentive. Physical Object. (NAPO) Amount of Matter. (M) Physical Endurant (PED) Physical Quality. (PQ) OGD. GK. MSDS. Mutual specific. spatial dependence. One-sided generic constant dependence. Generic constant. constitution. Quality (Q) heavy. pebbly. wood. rocks, sand, water. table. coast. corner of a table. curve of a bay")
40
Spatial Representations
Ontology Qualitative Spatial Reasoning and Representation Language 40 40

41
QSR: Region-Connection Calculus with 8 base relations
Randell, Cohn, Cui 1992: RCC8 41 41

42
QSR: Region-Connection Spaces: RCC-5, RCC-8, 9+, etc.
Randell, Cohn, Cui 1992 etc. / Egenhofer 42 42

43
QSR: Reasoning by Composition
Composition table for RCC-8 43 43

44
QSR: Double cross calculus: Freksa / Zimmermann (1996)
Qualitative description of position relative to a directed line segment 44 44

45
QSR: Reasoning by Composition
ab:c ○ bc:d →ab:d Composition for reasoning 45 45

46
QSR: Reasoning by Composition
Homing, Shortcut, Inverse, Homing-Inverse,Shortcut-inverse Composition with additional relations 46 46

47
QSR: Star Calculus Renz/Mitra 2004 47 47

48
QSR: Dipole Moratz et al. 2000 48 48

49
QSR: OPRA Moratz et al. 2005 49 49

50
QSR: QTC 50 Van de Weghe et al. Qualitative Trajectory Calculus
single object moving two objects moving 50 50

51
Spatial Representations
Ontology Qualitative Spatial Reasoning and Representation Language 51 51

52
Linguistic usage evidence…
what does ‘on’ mean? Herskovits (1986) 52 52
")
53
And more usage evidence…
what does ‘in’ mean? Herskovits (1986) 53 53
")
54
And more usage evidence…
what does ‘in’ mean? “The cat is in the table” Herskovits (1986:125) 54 54
")
55
And more usage evidence…
what does ‘in’ mean? The potato is in the bowl Herskovits (1986) 55 55
")
56
Relating calculi and language
Egenhofer and colleagues 56 56

57
Spatial Language extremely flexible sensitive to function and purpose
57 Coventry, Garrod and others 57

58
Many types of spatial information
Ontology Qualitative calculi: RCC-n, Dipoles, Doublecross, etc. Way-finding abstractions: choremes Free-space representations (Voronoi) Natural language descriptions Metric maps With different reasoning methods, different coverage, different strengths and weaknesses 58 58
 Natural language descriptions. Metric maps. With different reasoning methods, different coverage, different strengths and weaknesses")
59
Representations of Space
ontology Foundational Ontologies Qualitative Spatial Reasoning + Representation Linguistics physical mathematical Geometry R3 BFO DOLCE GFO RCC DC OPRA 9+ GUM-Space ? ? ? ? ‘alignment’ 59 59

60
Methodological conclusion and starting point
There is no sense in which a simple ‘merging’ of all of the above is a sensible strategy to follow 60 60

61
Distinct facets or ‘theories’ rather than inheritance
link in transit system (ferry) geographical region lake source of pure water recreational area obstacle 61 61
 geographical region. lake. source of pure water. recreational area. obstacle")
62
Many perspectives on ‘reality’: many ontologies
space-1 event time space-2 event Ontologically diverse 62 62

63
Ontological diversity inter-ontology mappings
landmarks event types time choremes CASL CASL CASL CASL route graphs Way description CASL 63 63

64
Mapping between modules
“Hyperontology” points of interest road conditions time directions Mapping between modules health status problem area 64

65
Essential properties we are currently developing
Perspectivalism Objects Activities Artifacts: spatial artifacts Language Granular partitions Plug-and-play spatial theories 65 65

66
Essential ingredients we are drawing on
Existing ontologies Existing formal tools Extensions for the specific problem of combining information flexibly Combining distinct reasoning possibilities 66 66

67
Essential ingredients we are drawing on
Existing ontologies DOLCE (for cross-category binding and axiomatization) BFO (for sites, niches and places and for SNAP/SPAN) GUM (generalized upper model for linguistic semantics) 67 67
 BFO (for sites, niches and places and for SNAP/SPAN) GUM (generalized upper model for linguistic semantics)")
68
DOLCE basic categories
68 68

69
Defining Qualities 69 I1-[OntoSpace] Quality Space
Gärdenfors: Geometric Fauconnier: Logical 69 69
![Defining Qualities 69 I1-[OntoSpace] Quality Space](http://slideplayer.com/slide/697792/2/images/69/Defining+Qualities+69+I1-%5BOntoSpace%5D+Quality+Space.jpg "Gärdenfors: Geometric. Fauconnier: Logical")
70
Defining Qualities 70 I1-[OntoSpace] Quality Space
Gärdenfors: Geometric Fauconnier: Logical Goguen: algebraic theory Theory 70 70
![Defining Qualities 70 I1-[OntoSpace] Quality Space](http://slideplayer.com/slide/697792/2/images/70/Defining+Qualities+70+I1-%5BOntoSpace%5D+Quality+Space.jpg "Gärdenfors: Geometric. Fauconnier: Logical. Goguen: algebraic theory. Theory")
71
Color Space (1): Color wheel
HUE ORANGE YELLOW CHROMATICNESS GREY RED GREEN VIOLET 71 From: Gärdenfors (2000, p10) 71
 71.")
72
Color Space (2) 72 WHITE GREEN YELLOW CHROMATICNESS BLUE RED
From: Gärdenfors (2000, p11) BLACK 72 72
 BLACK")
73
Defining Qualities 73 Quality Space 73 WHITE GREEN YELLOW BLUE RED
BLACK WHITE 73 73

74
Dolce treatment of qualities
Qualia: the position of an individual quality within a quality space 74 74

75
DOLCE: spatial information
For DOLCE, space is also a quality... 75 75

76
DOLCE: relevant for space
Physical Objects Physical Endurants (PED) Spatial Location Space Region 76 76
 Spatial Location. Space Region")
77
DOLCE: relevant for space
Physical Objects Physical Endurants (PED) Spatial Location Space Region 77 77
 Spatial Location. Space Region")
78
Dolce treatment of qualities
Qualia: the position of an individual quality within a quality space 78 78

79
Dolce treatment of qualities
Space Region Qualia: the position of an individual quality within a quality space 79 79

80
Valuable for `swappable’ treatments of space
ql PQ PED qt Physical Endurant Physical Quality Quality Space: quale 80 80

81
`Swappable’ treatments of space
Should be possible to select formalization for the reasoning task at hand Formalized modules ql PQ PED qt RCC-5,7,8,10,15,23 Dipoles: D14 , DRA14 DRAfp Cardinal directions Double Cross 81 81

82
Essential ingredients we are drawing on
Formal and computational tools CASL Common Algebraic Specification Language (for specification, structuring and relating) HETS Heterogeneous Tool Set (for connecting to a range of reasoners) 82 82
 HETS Heterogeneous Tool Set (for connecting to a range of reasoners)")
83
Formalization choice: CASL Common Algebraic Specification Language
Standardised first-order specification language designed by CoFI “Common Framework Initiative for algebraic specification and development” since 1995 de facto standard approved by IFIP WG 1.3 “Foundations of Systems Specifications” (1998), extensive documentation (LNCS 2900, 2960) extensive User Manual and Reference Manual now available from Springer (LNCS 2900, LNCS 2960) supports structured specifications including imports, hiding, renaming, union, extensions, etc. 83
, extensive documentation (LNCS 2900, 2960) extensive User Manual and Reference Manual now available from Springer (LNCS 2900, LNCS 2960) supports structured specifications including imports, hiding, renaming, union, extensions, etc. 83.")
84
The Tool HeTS Institution Theory 84

85
CASL language constructs
Structuring mechanisms: potentially applicable to any specification language as an additional layer of ‘meta’-organisation for semantic modularity OWL, UML, CommonLogic, etc. 85

86
Formalization choice: CASL Common Algebraic Specification Language
Extensions: we have now added OWL-DL to the family of logics supported we are exploring combining the structuring principles of CASL and description logics we are progressively formalizing the entire family of qualitative spatial calculi 86 86

87
Lüttich & Mossakowski (FOIS 2004)
Axiomatized Ontology in CASL DOLCE Primitives GenParthood 87 87

88
Lüttich & Mossakowski (FOIS 2004)
GenParthood DOLCE GenMereology 88 88

89
Lüttich & Mossakowski (FOIS 2004)
Primitives GenParthood GenMereology spec MEREOLOGY = PRIMITIVES then %%Ad7, Ad8, Ad9 and Ad10 are generated by %% instantiation of GenMereology GENMEREOLOGY [sort T] GENMEREOLOGY [sort S] GENMEREOLOGY [sort PD] end Mereology 89 89

90
The DOLCE ontology in CASL
spec PreDolce = Mereology_and_TemporalPart and Temporary_Mereology and Participation and Constitution and Dependence and Direct_Quality and Temporary_Quale and Immediate_Quale end spec Dolce = PreDolce and Taxonomy end work continuing... 90 90

91
Lüttich & Mossakowski (FOIS 2004)
Development Graph showing dependencies between specifications and proof obligations Links: theory morphisms imports of theories relative interpretations of theories open proved 91 91

92
Reasoning 92 First-Order Reasoning with CASL/HETS reasoners
Description logic reasoning with DL reasoners Spatial Reasoning with specialized spatial reasoners: SparQ, GQR 92 92

93
Reasoning: SparQ Frank Dylla, Lutz Frommberger, Jan Oliver Wallgrün, and Diedrich Wolter 93 93

94
Lessons drawn Idea: Providing channels to ontologies provides access to detailed contextual ‘world-knowledge’ that does not then have to be worked out again… Ontology Application 94 94

95
Sharing knowledge and achieving interoperability
Many projects, many products, many information providers now constructing ontologies BUT: proliferation of unrelated designs, impoverished or application-specific semantics, ‘roll your own’ ignoring previous attempts lack of interoperability ... which was precisely what ontologies were meant to provide! 95

96
modelling language dependence
Metamodels: commonly restricted to ensuring translatability across formal languages not content modelling language dependence Horiuchi 96

97
LOA, Dolce group: EU WonderWeb Project
97 97

98
Problems... 98 Looseness of definition Sparseness of definition
does not give much to ‘get hold of’ for relating distinct accounts/levels of abstraction 98 98

99
Conclusions: Ontology Best Practice
‘Light’ ontologies: semantic web ... ‘Heavy’ ontologies: Rich axiomatization Formal principles Well-defined design criteria 99 99

100
Lessons drawn 100 Ontological best design principles axiomatization
modularity heterogeneity perspectivalism 100 100

101
Ontology construction
Axioms are grouped into logically appropriate theories Theories may be extended via parameterization to achieve semantic re-use Theories may be created and related by views: theory morphisms Only with this availability of working with meaningful interrelationships can the complexity of distinct axiomatized ontologies really be harnessed. 101 101

102
Where next? Geospatial Information set to become the next major area of ontological development? However, just converting existing schema to OWL is probably not going to be adequate 102 102

103
Questions: modularity?
OpenGIS® City Geography Markup Language (CityGML) Encoding Standard (2008) 103 103
 Encoding Standard (2008)")
104
Questions: modularity?
104 Geometry to BDM to IFC 104

105
Selected Application Scenarios
Our Next Steps Selected Application Scenarios assisted ambient living (AAL) ADL, spatial activities, ... geographic information science (GIS) OpenGIS, OGC, CityML, OpenStreetMap, ... assisted architectural design (AAD) IFC, BIM, ... In each application area, we want to interact directly with the appropriate national and international standards 105 105
 ADL, spatial activities, ... geographic information science (GIS) OpenGIS, OGC, CityML, OpenStreetMap, ... assisted architectural design (AAD) IFC, BIM, ... In each application area, we want to interact directly with the appropriate national and international standards")
106
Geographic Information Systems
<way id=" " visible="true" …> <nd ref=" "/> … <tag k="landuse" v="forest"/> </way> Our Next Steps Geographic Information Systems Ontologies framework for connecting distinct geographic layers modular breakdown of relevant knowledge improving re-use relation to non-geographic modeling relation to qualitative representations relation to existing standards support for verbalisation and visualisation <way id=" " visible="true" …> <nd ref=" "/> … <nd ref=" "/> <tag k="name" v="Feldackerweg"/> <tag k="surface" v="paved"/> <tag k="maxspeed" v="30"/> <tag k="highway" v="residential"/> </way> <way id=" " visible="true" …> <nd ref=" "/> … <tag k="landuse" v="forest"/> </way> OpenStreetMap 106 106

107
and we can only do that in cooperation with those with the detailed expert knowledge!
107 107
108
Acknowledgements 108 The entire SFB/TR8 team!
108 108

109
Advertisement International Research Training Group: semantic integration of geospatial information Application deadline soon! PhD training program 109 109

Similar presentations



















